请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWRL6844EVM Thread 中讨论的其他器件:AWRL6844、SysConfig、 AWRL6432
工具/软件:
尊敬的 TI:
对于如何在低功耗模式下进行 CANFD 通信、我希望获得一些指导。
我使用示例(mmwave_demo)实现了它、但出现了以下问题。
当在低功耗模式下配置 CAN FD 通信时、EVK 在一次操作后停止运行。
即使在没有 CAN Tx 和 Rx 的情况下仅设置通信、也会发生相同的现象。
在正常功率模式下、CAN 通信执行良好。
如果未配置 CANFD、则 EVK 将在低功耗模式下正常工作。
[配置环境]
EVK:AWRL6844 (PROC182修订版 A)
SDK:mmwave_l_sdk_06_00_02_00
演示:"mmwave_demo"
SysConfig:

EVK 开关: S1.1关闭(禁用 STAN-BY-MODE)
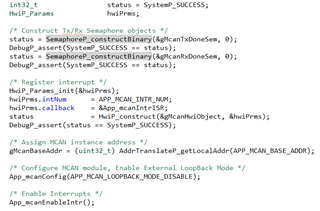
CANFD 通信设置是参考示例"mcan_external_read_write"配置的
CAN 配置在 DPC_init()函数内实现。
此致。
J.Soo