请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR2944EVM Thread 中讨论的其他器件:AWR2944、 IWR6843、 AWR2544
工具/软件:
您好、
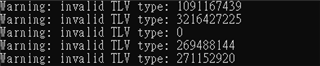
我 发现从数据 UART 端口丢失了输出数据。
1.你能帮助检查它吗?
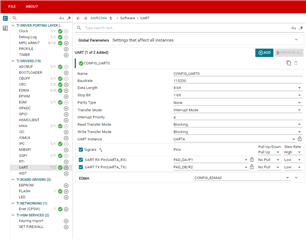
2.我尝试修改 mssgenerated 文件夹中 ti_drivers_open_close.c 中的 UART 设置。 再次构建工程后、该文件中的更改将丢失。 如何更改 UART 设置?
雷达电路板:AWR2944评估模块
雷达工具箱版本:v2_30_00_12
示例: source\ti\examples\mmwave_\awr294x\awr294x Out_Of_Box_Demo src
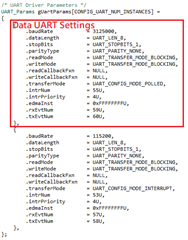
波特率:3125000
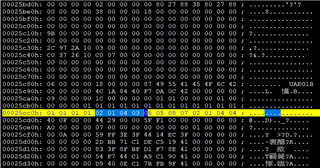
帧头中的神奇单词"0201040306050807"不在开头。 输出数据丢失。

mssgenerated 文件夹中 ti_driver_open_close.c 中的 UART 设置。
谢谢。