

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL1432BOOST Thread 中讨论的其他器件:IWRL1432、 SysConfig
工具/软件:
您好 TI 支持部门、
我目前正在使用 IWRL1432板 公式 液位检测应用 我有几个关于的问题 UART 功能 :
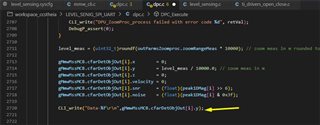
- 要将传感器数据发送到串行监视器、我使用
CLI_write()dpc.c文件中的函数(下面附上了代码片段)。 我可以在显示器上看到数据。 您能否确认这是否为推荐的方法? - 现在、我想看看 接收用户命令 从 外部 MCU 或串行监视器 位置 UARTA 处于中断模式 。
- 我在中启用了 UARTA 其中概述了 SysConfig 文件并选择 EOC 中断 选项。
- 但是、更改后、我遇到了几个错误(随附于下文)。
- 我的问题是:我是否需要实施 UART 回调函数 来处理中断? 如果是、请指导我继续 回调函数在何处放置 如何正确集成它?
- 是否可以在代码中一次同时使用这两个 UART?

期待您的支持。
此致、
Swasthik。
