请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR6843ISK 主题中讨论的其他器件:MMWAVEICBOOST、 AWR6843
工具/软件:
这是 上一个凸起的螺纹的延续。
测试用例1:
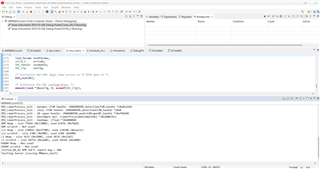
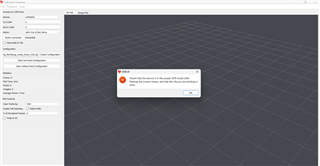
按照建议" 在 linker.cmd 中分配存储器 、并在 MSS 和 DSS 上都使用"优化级别-off "、能够 构建而不会出现任何错误。 但当我们尝试通过工业可视化工具发送配置时、会收到以下错误:
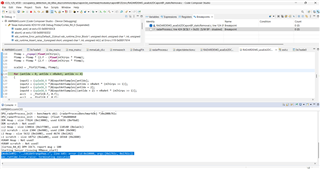
测试案例2 (代码中没有设置断点): MSS 和 DSS 上的默认优化级别-3、 能够 构建而不会出现任何错误。 我们能够通过工业可视化工具发送配置、 但代码会卡住、如下面的控制台所示
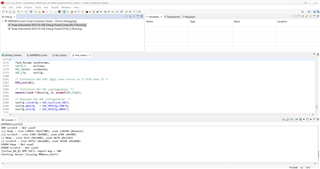
测试案例3 ( 代码中设置的断点(参考控制台)): MSS 和 DSS 上的默认优化级别-3、 能够 构建而不会出现任何错误。 我们能够通过工业可视化工具发送配置、 但代码会卡住、如下面的控制台和抛出错误所示)
请检查所有三个测试用例(1、2和3)并给出 解决方案。
此致、
Mani