

主题中讨论的其他器件:DCA1000EVM
工具/软件:
您好、
我们正在使用 IWR6843ODS + ICBOOST 和 DCA1000EVM 来捕获场景中人员的移动位置。
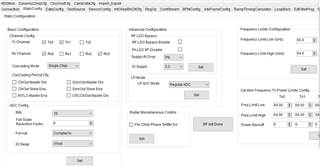
下图显示了 mmWave Studio 中使用的配置: 




但是、我们发现、当场景中只有一人并且他们正沿着雷达前方行走时(相对于雷达位置: X = 0、沿 y =[1.55、5.15]来回移动)、mmWave Studio 的后处理可视化工具中的检测和角度估算结果显示了两个角度(我们认为这不是由反射问题引起的、因为测试场景是在室外、左墙4.2米、右扶手3.6米、雷达前的开放空间超过10米)。 以下是显示此问题的视频链接: https://youtu.be/R05jDowhOBE
在另一项测试中、当人站在雷达右侧时(相对雷达位置:x = 1.8、沿 y =[1.55、5.15]来回移动)、检测和角度估算结果将检测到的位置显示为对角线位置(坐标在(2、1)和(4、4)之间来回移动)。 测试场景设置与上述相同。 以下是显示此问题的视频链接: https://youtu.be/wb4KEDlmnEY
我们怀疑这可能是因为 mmWave Studio 不考虑 IWR6843ODS 的特定虚拟天线阵列布置、因此我们尝试仅使用 IWR6843ODS 的一个方位角 ULA 子集进行测试(在 mmWave Studio 中、启用 Tx0 Tx1 Rx0 Rx3、保留 IWR6843ODS 虚拟天线子集:TX1-RX1、TX1-RX4、TX2-RX1、TX2-RX4)。 但是、在采用此设置时、当人正前方雷达时(x = 0、y =[1.55、5.15])、检测和角度估算结果显示三个方向而不是一个方向。 测试场景与上述相同。 以下是显示此问题的视频链接: https://youtu.be/Fv2bAmdigWk
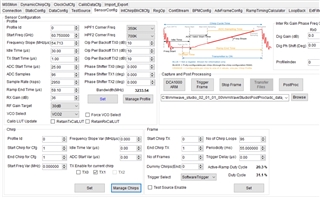
以下是我们使用 IWR6843ODS 单方位角 ULA 子集进行测试时使用的设置:

目前、我正在将 DCA1000EVM 记录的 bin 文件解析到3D 笛卡尔点云中。 然而、检测目标的点云结果并不理想。 因此、我想首先检查 TI 在 mmWave Studio 中对 DCA1000EVM bin 文件进行后处理而生成的点云。 但是、我注意到 mmWave Studio 的检测和角度估算结果似乎有点奇怪。 您能说明一下为什么会出现这种情况吗? 此外、mmWave Studio 是否使用 MATLAB 脚本来处理 bin 文件以供参考?
此外、您能否告知、当前的传感器配置参数是否适用于在这种室外场景中检测和跟踪移动的目标?
