请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL6432BOOST Thread 中讨论的其他器件: UNIFLASH
工具/软件:
TI 团队大家好、
我目前正在使用 IWRL6432BOOST 表面分类演示、专门测试草防模式和湿干模式。
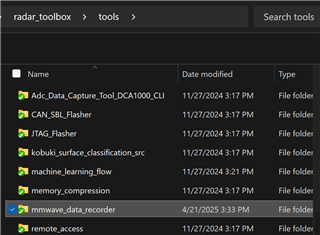
我使用 UniFlash 刷写位于以下路径的映像:
C:\ti\radar_toolbox_3_00_00_05\source\ti\examples\Industrial_and_SDK\Robotics\surface_Classification_ml_flow_pytorch\prebuilt_binaries\surface_classification_demo_SDK5502-grasse-not.Debug.appimage Personal_Electronics
然后、我使用工业可视化工具运行演示。
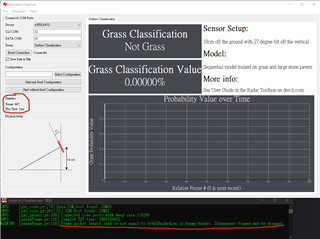
但是、我遇到了以下警告消息:
警告:读取的帧数据包长度不等于帧标头中的 totalPacketLen。 可能会丢弃后续帧。"
如何解决此问题?
(统计数据中的帧编号正在计数。)
此外、我还想问:
如何使工业可视化工具显示干湿标签而不是草?
目前、它仅显示草型。 这是唯一可用的版本吗?
非常感谢您的支持和帮助。
此致、