请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL6432AOPEVM 主题中讨论的其他器件: IWRL6432AOP、 IWR6843、 IWRL6432
工具/软件:
尊敬的 TI 团队:
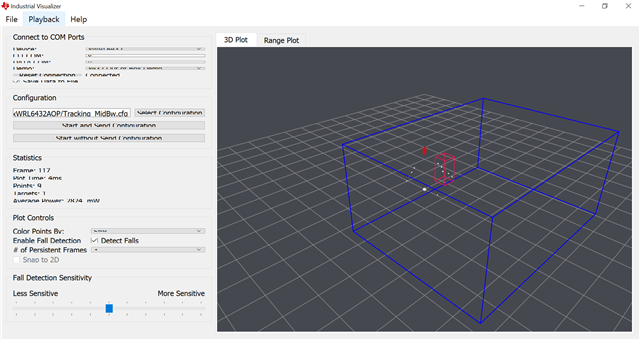
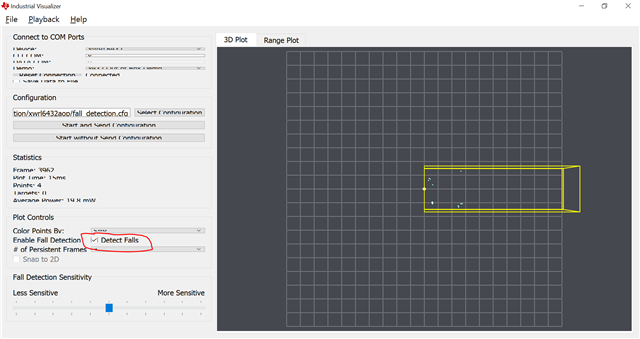
我目前正在使用 IWRL6432AOPEVM 并希望评估其跌倒检测能力。 能否请您确认上是否支持跌倒检测 IWRL6432AOP ?
如果支持、我希望您能.cfg为此用例提供适当的固件和配置()文件。 我遇到了"使用毫米波进行跌倒检测"参考、但似乎专门为 IWR 设计 6843 AOPEVM。
期待您的指导。
谢谢您、
Bhavya