请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:IWR6843ISK-ODS 工具/软件:
我更RANGE_BIN_END改为 20、因此该器件可以在大约 100cm 的距离内捕获特征、但刷写固件后、无法从数据 COM 端口读取任何数据。

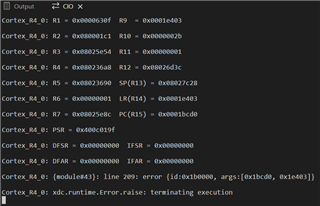
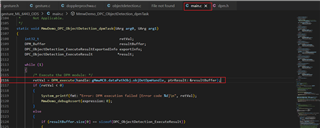
我使用 JTAG 进行调试、但我遇到了一个问题。 我可能忽略了哪些方面、如何解决?

工具/软件:
我更RANGE_BIN_END改为 20、因此该器件可以在大约 100cm 的距离内捕获特征、但刷写固件后、无法从数据 COM 端口读取任何数据。
我使用 JTAG 进行调试、但我遇到了一个问题。 我可能忽略了哪些方面、如何解决?