请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843AOP 工具/软件:
我想恢复这一主题、因为我已恢复该项目的工作。
通过当前配置、我能够准确地检测到周围的物体 12 米 。 超过该距离后、便会失去检测功能。 我尝试过调整 较低的开关频率 、但我没有观察到检测范围有任何明显的改善。
引用到我的最后一个帖子相关:
Hi everyone,
I've been working with the IWR6843AOP sensor using the 3D People Tracking demo, with the sensor mounted on a wall at a 15° downward tilt. I've run several tests, adjusting the detection and tracking parameters across different configurations. I'm using the IWR6843AOP EVM board and configuring its parameters based on the documentation in Section 4 of the 3D People Tracking Demo Detection Layer Tuning Guide.
However, in nearly all cases, the maximum detection range caps at around 12.5 meters. Beyond this distance, no point cloud is detected, and no target is tracked.
In my most recent test, I increased the transmission power by configuring the txOutPowerBackoff to 0 dB, which did result in extended detection up to 14 meters in some cases—but with significantly more background noise throughout the reading.
I’d like to understand whether:
There’s something potentially misconfigured in my setup that's causing this limitation, or
The sensor is inherently limited to around 12.5 meters in most real-world scenarios, despite parameter tuning.
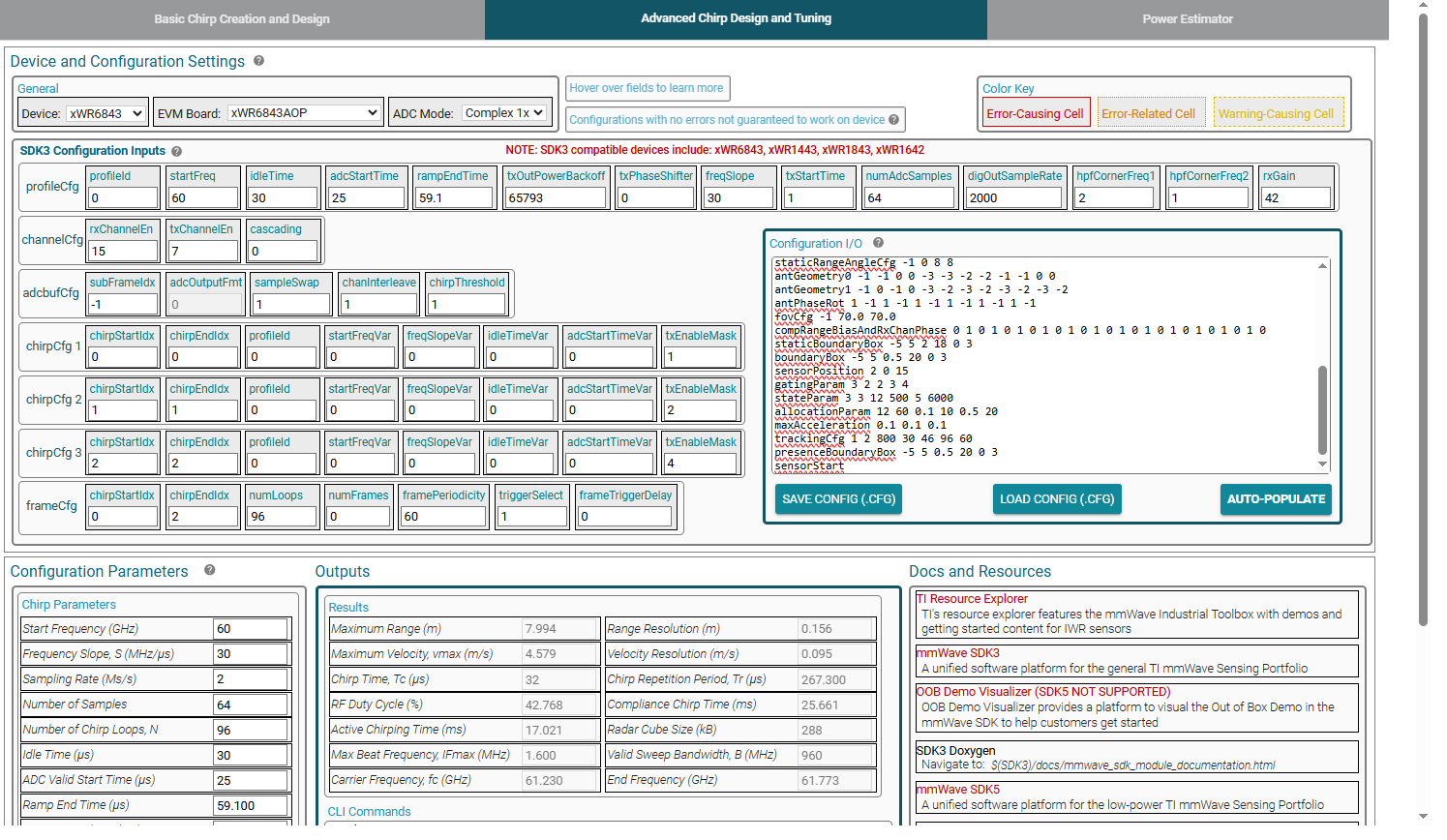
Any insights or suggestions would be greatly appreciated!此外、任何人都能告诉我使用了什么软件来根据获取传感器指标吗 .cfg 文件 显示的内容吗? 这个工具看起来非常有用。