请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL6432AOPEVM 主题中讨论的其他器件: IWRL6432AOP、 UNIFLASH、MMWAVE-L-SDK、 IWRL6432、SYSCONFIG
工具/软件:
大家好、朋友、我购买了 IWRL6432AOPEVM 雷达板。 我的目标是通过 UART 通信将距离、存在、运动等数据传输到主机 MCU 并对其进行解析。 我有以下一些问题:
- 板 IWRL6432AOPEVM 上的 UART 端子有哪些、可在其中连接主机 MCU 的 UART 引脚以将数据接收到主机 MCU、或将任何串行终端接收到 PC?
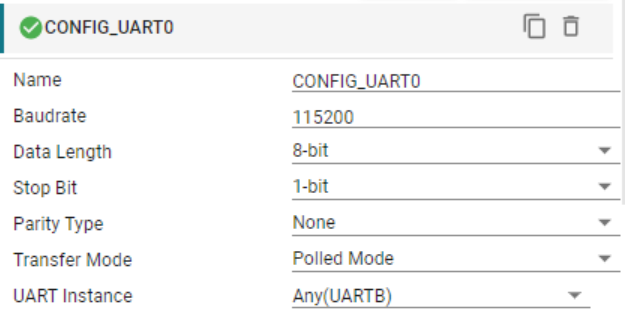
- 在每个数据包的数据位、奇偶校验和停止位以及 RTS 和 CTS 的使用方面、IWRL6432AOPEVM 的 UART 的默认配置是什么?
- 我们是在为板 IWRL6432AOPEVM 供电后开始将 UART 终端上的数据作为连续流获取、还是我们可以根据自己的选择启用或禁用数据?
- 如何更改 UART 通信的波特率? 是否也使用相同的波特率将数据发送到 GUI?
- 我们如何控制雷达传感器的启动和停止操作、以便能够节省功耗并仅在需要时(通常是周期性的)启用感应。
- 此链接的文档中提到过该内容>“ software-dl.ti.com/.../MOTION_AND_PRESENCE_DETECTION_DEMO.html 帧头大小为 52 字节、但在计算帧头结构 (MmwDemo_output_message_header_t) 的大小之后、甚至添加 TLV 结构 (MmwDemo_output_message_tl_t) 大小并不等于 52 字节、是否未提及某些数据字段或其他原因?
我非常感谢您的支持。
谢谢你。