请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL6432AOPEVM Thread 中讨论的其他器件:IWRL6432BOOST、 SYSCONFIG、IWRL6432AOP、 UNIFLASH
工具/软件:
您好、
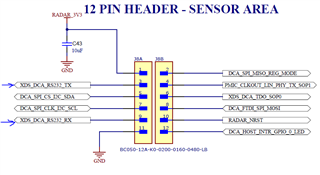
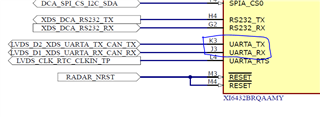
我正在尝试设置 UART 以从 AOPEVM 连接以将数据发送到 ESP32、但我不确定电路板上的哪些引脚要使用、以及如何在软件中设置它们? 我似乎找不到正确的原理图/图、其中显示了电路板上引脚名称与软件标记的引脚名称的正确映射。