Thread 中讨论的其他器件: SYSCONFIG、UNIFLASH
工具/软件:
您好:
我尝试 为 IWRL6432AOPEVM 电路板修改示例 motion_and_presence_detection_demo_xwrL64xx-AOP_M4fss0-0_freertos_ti-arm-clang、以使其在没有可视化工具应用的情况下运行。 我启用了“CLI Remove“和“MPD DPU Enable“选项。 我添加了一些代码、用于在检测到物体时启用 PWM 输出。 我第一次放置 PWM 引脚失败 — 无法使用 I2C 引脚在 J1 上实现方便的示波器连接(这已在另一个 POST 中解决)。 我将 PWM 引脚保留在默认位置 E3 和 E4、代码在调试中运行。 现在、我需要以下方面的帮助:
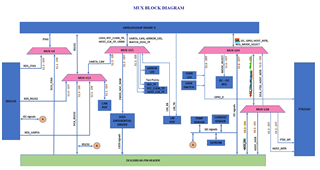
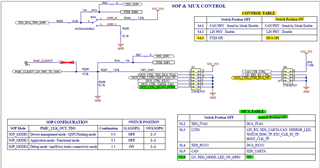
1、电路板原理图有一个很棒的多路复用器。 在不中断代码使用的其他一些信号的情况下、跟踪信号会变得非常困难。 应该为 PWM 使用哪些引脚? 我应该设置什么开关位置? 我的 PWM 信号会从哪里发出、以便与它们建立连接? 我是否需要进行任何硬件修改?
2.需要一个具有固定占空比(直流)50%的 PWM 信号。 我需要另一个具有不同直流值的信号、具体取决于与最近物体的距离。 我是否需要更改任何文件中的任何配置默认设置 (#define )? 我在 DPC_Execute () 函数中找到了一个位置,当检测到的对象数被计算出来时。 我找不到一个可以可靠计算物体距离的地方。 请导航我。
3.如果我希望两个 PWM 输出具有不同的基频、我有没有办法这样做? 可能是用于固定直流 PWM 的计时器和 GPIO? 我是否可以使用 ePWM 的斩波功能在 1kHz 范围内使 4kHz 有效?
4、当上述操作正常时,我想将 CAN 通信添加到代码中。 到 J3 的信号路由是否与电路板上的 PWM 或任何其他所需的信号路由(通过多路复用器)冲突?
Alex