

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843AOP工具/软件:
TI 团队大家好、
我目前正在使用 AWR1843AOP IC 并已成功刷写 MRR(中距离雷达) 来自 Radar Toolbox 的应用程序 (radar_toolbox_2_20_00_05)。 我对基于雷达模块物理方向的坐标帧解释有疑问。
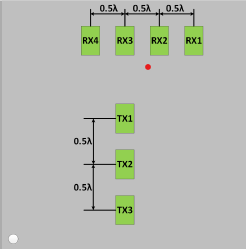
根据文档 (obstacle_detection_aop_users_guide.html)、场景 1:AWR1843AOPEVM 的物理方向应如下所示、芯片的天线布置应如下所示
在这种情况下、包数据 x cordinates 表示(沿横向轴的距离)、Y cordinattes(沿纵向的距离)和 Z(沿高度轴的距离) 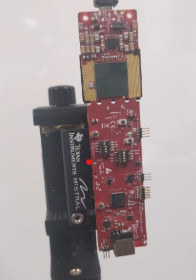
场景 2: 如果 我按如下所示安装 AWR1843AOPEVM 、并按照以下 pic 放置天线 
问题:
-
是我对的理解 X、Y 和 Z 坐标 在所述情景 1 中是否正确?
-
在场景 2 中、的解释是什么 X、Y 和 Z 坐标 提供的最小和最大电流 工作原理 ?
-
这些坐标是否保留与场景 1 中相同的含义、或者是否根据进行更改 物理方向 任务是什么?
-
