请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843AOPEVMThread 中讨论的其他器件: AWR1843BOOST
工具/软件:
TI 团队大家好、
我遵循了用户指南 automated_parking_18xx_users_guide.html 并成功刷写了预编译的二进制文件 “xwr18xx_mmw_AOP_demo.bin"</s>“ 位于:
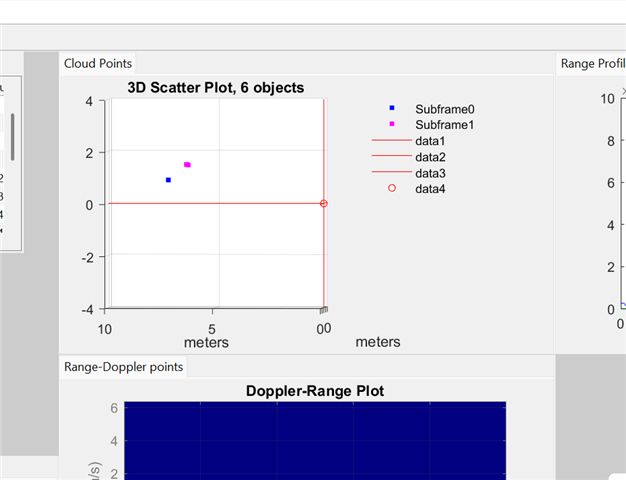
C:\ti\radar_toolbox_3_20_00_04\source\ti\examples\Automotive_ADAS_and_Parking\automated_parking\prebuilt_binaries、位于中 AWR1843AOPEVM 并将数据拿到 Matlab GUI 上。
根据 《TI AoP 泊车应用用户指南》的第 3.2.2.1 节 、传感器即使处于静态条件下、也能够检测到行人。 (请参阅图 3-4 中的)
但是、在测试期间(传感器是静态的)、雷达仅检测到移动的物体、无法检测到站在传感器前方 5 米范围内的静止行人。
您能否帮助澄清一下是否需要其他配置来启用静态物体检测?
谢谢
Mitesh