请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR2944工具/软件:
尊敬的 TI 团队:
在最近的测试中,我发现了频谱中存在的一个问题,我使用 RTS 创建了一个 30m-30dBsm-0kph 的目标,这个目标可以在 2D 频谱中正确地观察到
但是、在此目标峰值之后的第 4 个和第 7 个区间会出现假峰、即使更改了波形配置并调整了 RangeBin 的标度、第 4 个区间和第 7 个区间仍会出现问题
例如:
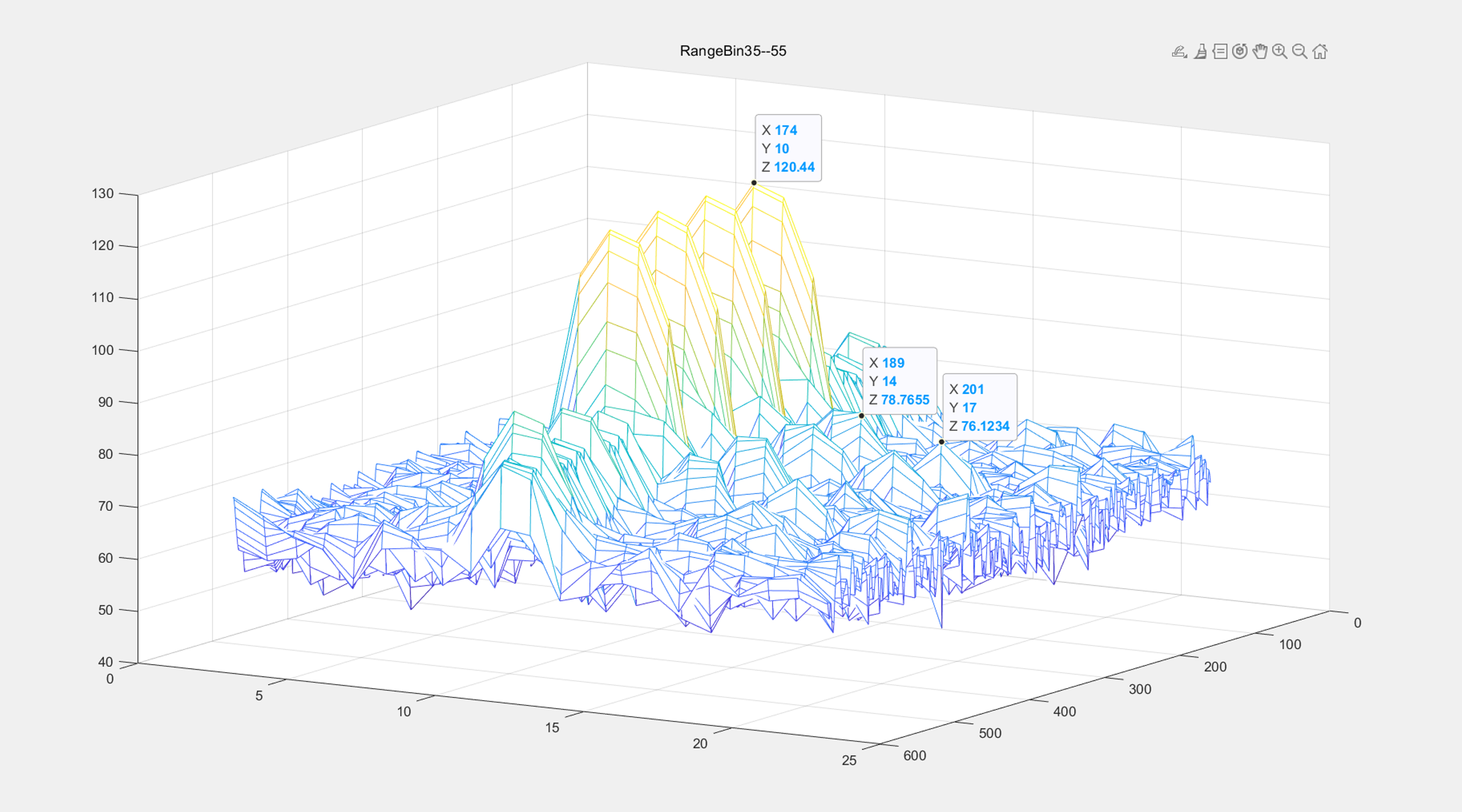
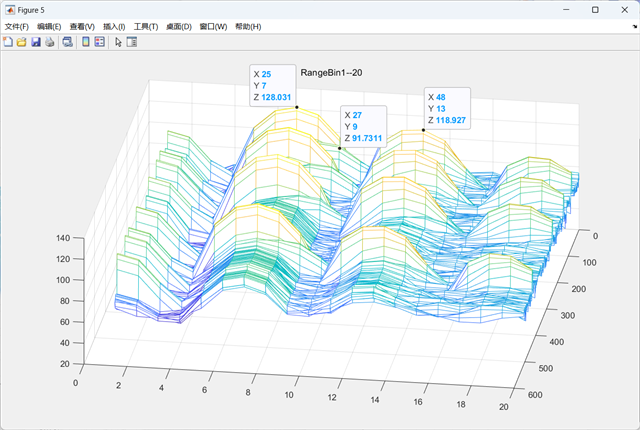
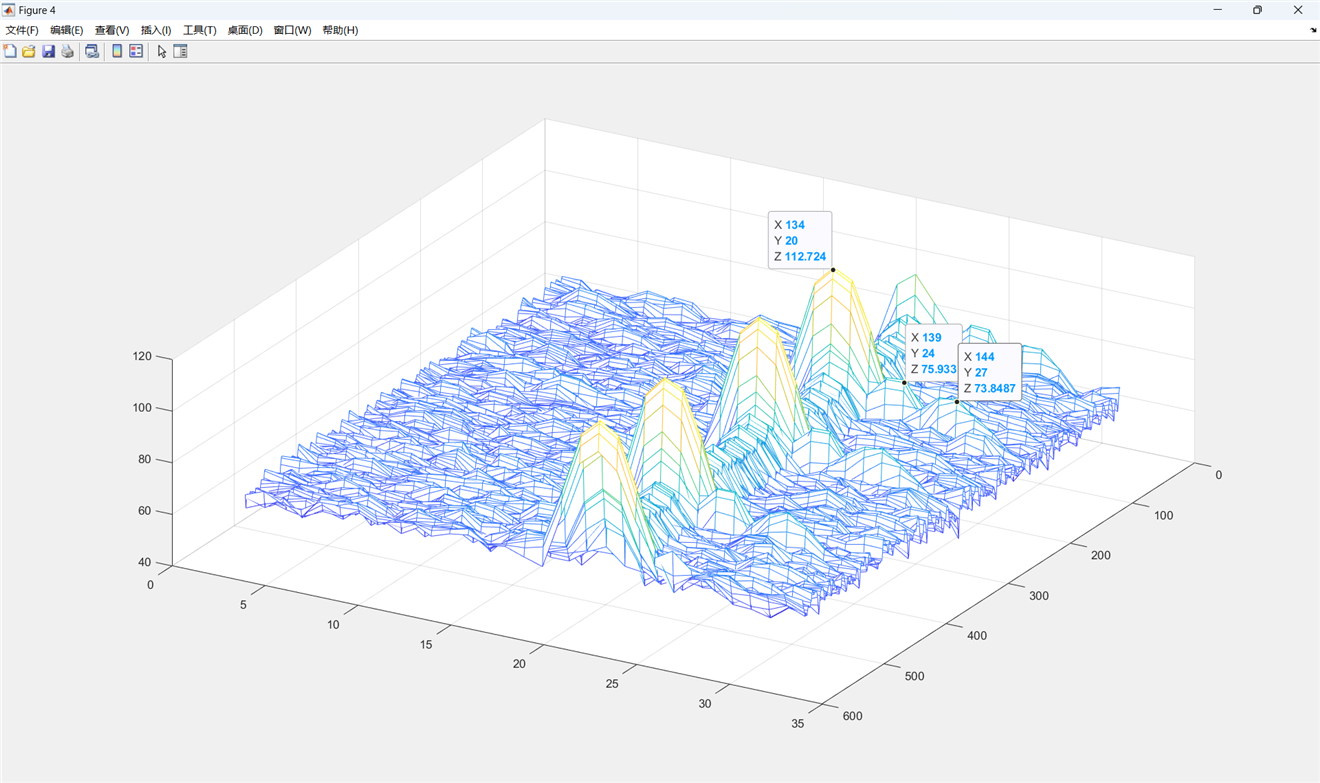
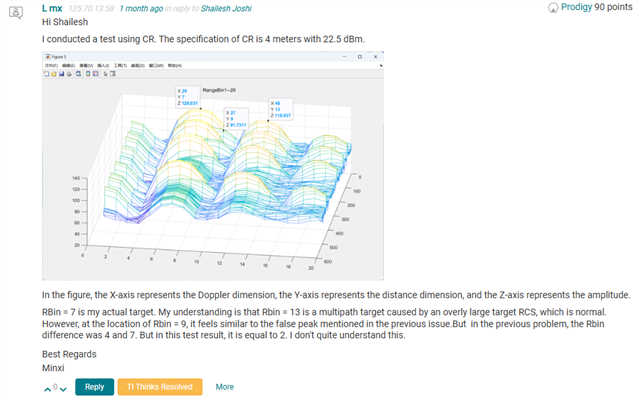
第一个波形:图纸覆盖范围为 35-55 箱(因此实际箱为 45),在位置 14 和 17 有假峰
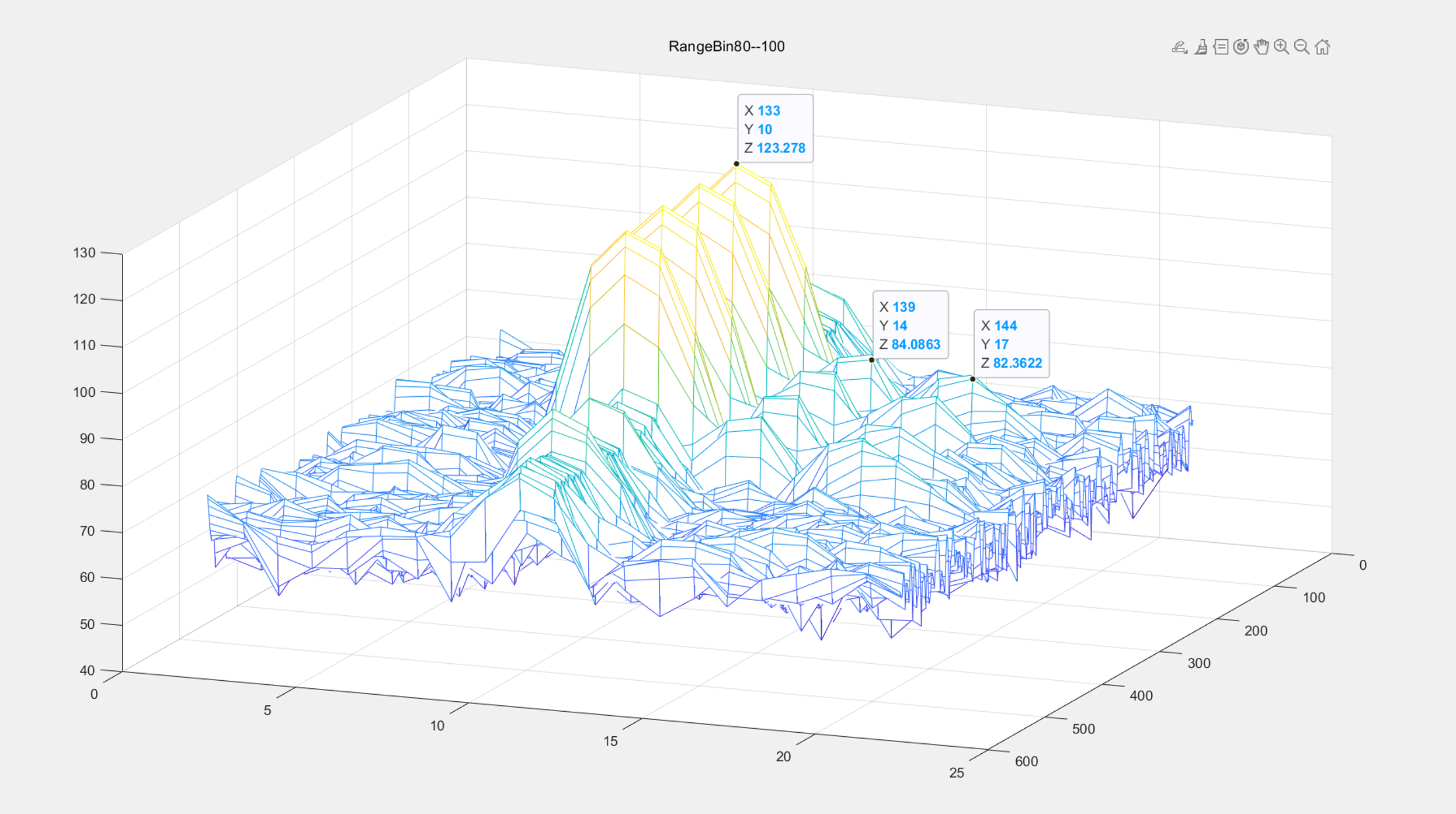
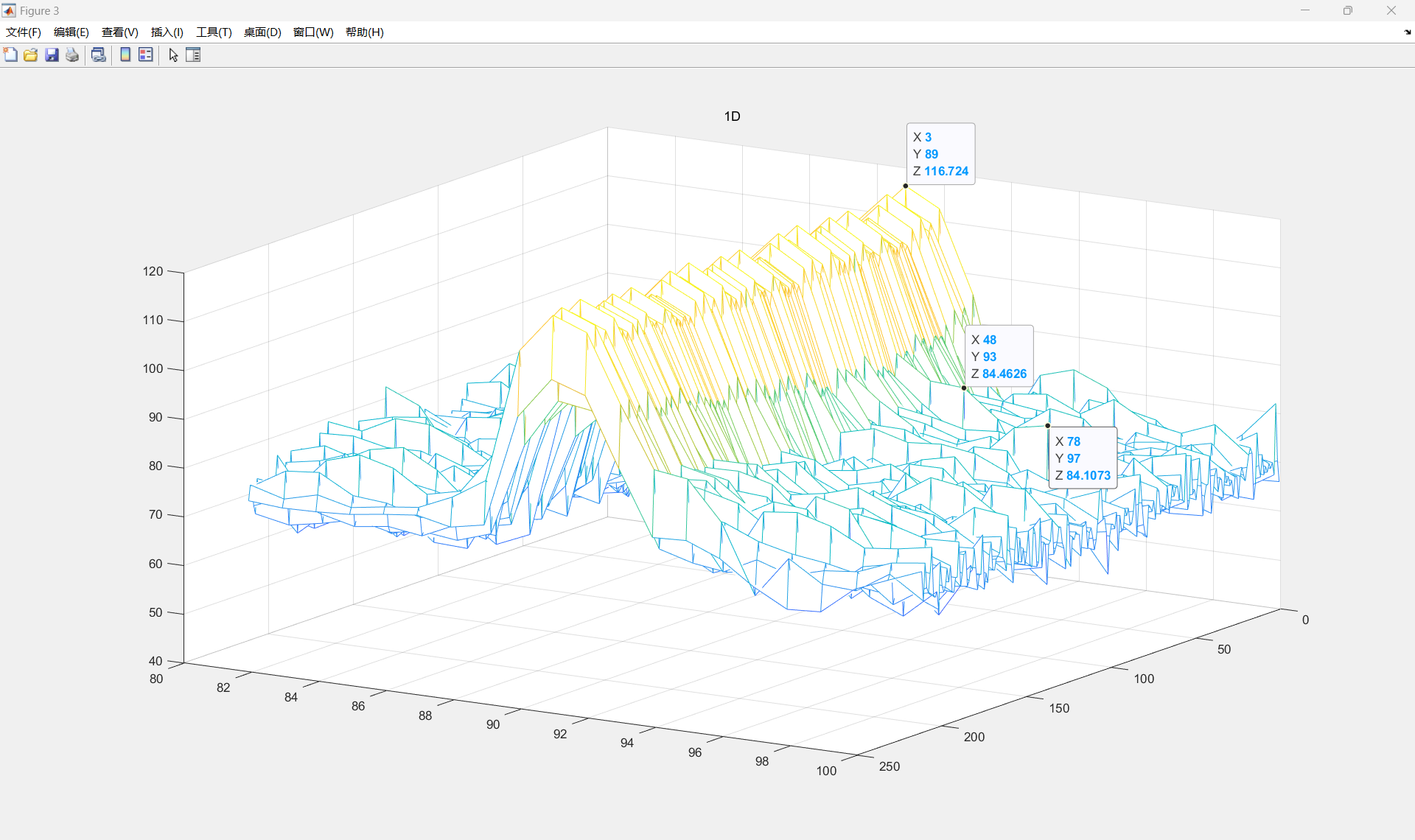
第二个波形:绘图覆盖范围为 80-100 箱(因此实际箱是 90),位置 14 和 17 也有假峰
关于上述情况、我的理解是、如果这两个目标确实存在于环境中、那么随着波形斜率的变化、它们的差异也应该一起变化、而不是固定为与实际目标相差 4 和 7 个。
这种情况可以通过使用 TI2944EVM 和 OOB 演示、以及使用 Adv-chirp-Adv-frame 表示配置文件来重现。
我可以从哪些方面分析这个问题? 谢谢!
此致
Minxi