请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR2944PEVM主题中讨论的其他器件:AWR2944P、AWR2243BOOST、 AWR2243
工具/软件:
嗨、
使用 AWR2944P DSP 上的毫米波 SDK、我们首先对 DSP 本身运行 FFT、CFAR 和角度估算。 然后、我们如何通过以太网定义自定义 UDP 有效载荷格式、以便 Jetson 准确接收我们处理过的数据? 例如、我需要将每个检测到的目标的【距离,多普勒,角度】三元组(12 字节)加一个用户定义的 4 字节时间戳、而不是默认的点云 TLV。 哪些 API 调用或 cfg 文件控制着这一点?
AWR2944P 是否与 AWR2243BOOST 使用相同的主机端毫米波链路(基于 TLV)API? 将 Jetson 代码从 2243 移动到 2944 时、我是否应该注意函数名称、参数或支持的 TLV 类型是否有任何变化?
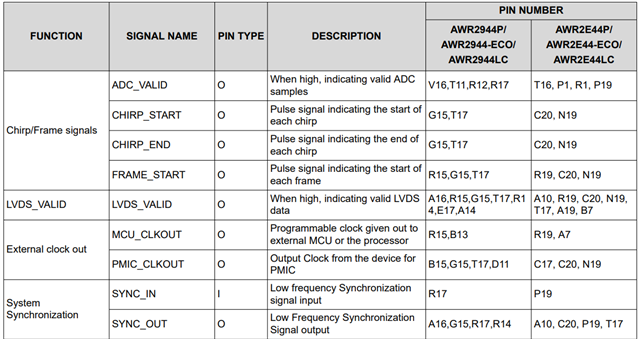
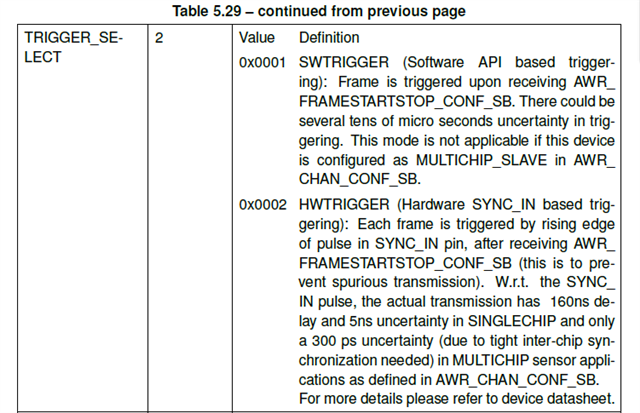
在 AWR2944P EVM 上、我们无法找到专用的同步输入引脚。 GPIO_28 连接到板载按钮 (SW1)。 我们是否可以移除 SW1 并将外部触发电缆连接到 GPIO_28 以实现多芯片同步? 我们目前成功地将 3.3V 脉冲从 Jetson 驱动到 AWR2243BOOST、并需要在 AWR2944P 上进行相同的设置。
我们在 AWR2944P EVM 上进行的编程是否能够承受下电上电? 因此、每次重新启动电路板时、我们不需要加载.cfg。
最后一个问题只是我在 AWR2944P 用户指南中注意到的一个观察结果、我在图片中看到 AWR2944P 连接了 DCA1000、这是否有任何用途? 由于 AWR2944P EVM 有自己的以太网端口、因此可以自行将 UDP 数据包发送到外部处理器。
//埃米尔