请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843AOP工具/软件:
当前正在使用开箱即用演示映像和 MM Wave_Demo_Visualizer 3.6.0 来获取.cfg 文件。 器件是 RS-1843AOPU。
我们的要求是:
- 雷达方向:仅前向、30 米或更大的距离
- 检查是否有足够的空间让我们的 4 米宽的设备通过
我们只关心两件事:
- 检测障碍物的距离
- 是否存在障碍物
我们不关心距离分辨率、角度信息、速度或其他信息。
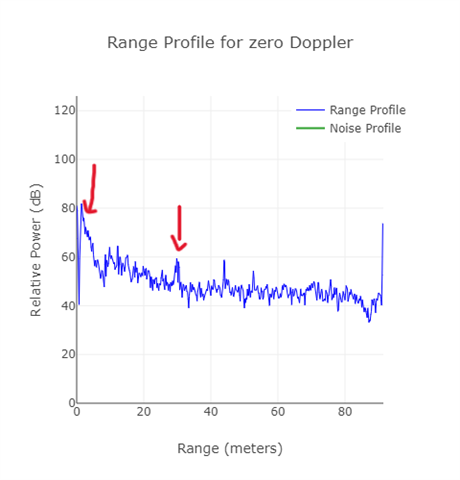
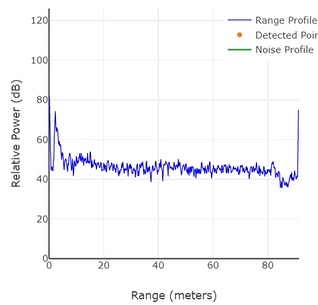
然而、我们目前无法精确检测 30 米处的障碍物。 我们的测试对象是汽车和墙壁。
我应该选择哪个演示映像?哪种.cfg 配置更适合实现此目的?
此致、
%****************************************************************************
为 SDK 版本创建的百分比:03.06
使用可视化工具版本:3.6.0.0 创建的百分比
%频率:76
%平台:xWR18xx_AOP
%场景分类器:best_range_res
方位角分辨率百分比(度):30 + 60
%距离分辨率 (m):0.179
最大不模糊距离百分比 (m):75.17
%最大径向速度 (m/s):0.32
%径向速度分辨率 (m/s):0.04
帧持续时间百分比(毫秒):100
% RF 校准数据:无
%****************************************************************************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 7 0
adcCfg 2 1
adcbufCfg –1 0 1 1
profileCfg 0 76 1491 7 50 0 0 20 1 512 12190 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 1 0 0 0 0 2
frameCfg 0 1 16 0 100 1 0
低功率 0 0
guiMonitor –1 1 0 0 0 1
cfarCfg –1 0 2 8 4 3 0 15 1
cfarCfg –1 1 0 4 2 3 1 15 1
MultiObjBeamForming –1 1 0.5
离合器拆卸–1 0
calibDcRangeSig –1 0 –5 8 256
extendedMaxVelocity –1 0
lvdsStreamCfg –1 0 0
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
MeasureRangeBiasAndRxChanPhase 0 1.5 0.2
CQRxSatMonitor 0 3 5 103 0
CQSigImgMonitor 0 127 8.
模拟监视器 0 0
aoFovCfg –1 –5 –5 –5 5.
cfarFovCfg –1 0 0 73.14
cfarFovCfg –1 –0.32 0.32
calibData 0 0 0
sensorStart