请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWRL6432工具/软件:
尊敬的 TI 专家:
我们在开发过程中遇到了 detMatrix 数据异常。 请帮助我们分析可能的原因。
主板:AWRL6432
SDK 版本:mmwave_L_SDK_05_05_02_00
第三十二章
第 64 章
DetMatrix[32*64]
实际结果:
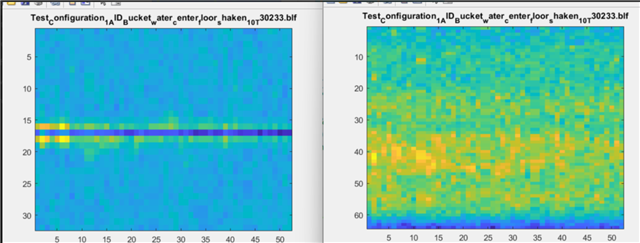
在配置完全相同的汽车中、我们有两个雷达同时工作、我们会遇到 detMatrix 数据异常、整体离矩阵数据将比正常帧大得多。 高速区域非常大,图片中出现明亮的条形
预期结果:
在只有轻微移动的场景中,高速区域的能量应该非常低,颜色应该是蓝色(低能量)。 下图中的黄色亮条不应出现
注意:
X 轴表示帧数。 场景数据中可能有 N 帧。
左图中的 Y 轴有 32 个速度单位,以及同一速度单位中所有 detMatrix 能量的总和。 。
右图中的 Y 轴有 64 个量程单位,这是同一量程单位中所有 detMatrix 能量的总和。
我们想知道在什么情况下会导致这种异常数据?
、时间约为 50 帧、在 100 个测试中、可能会出现大约 10 倍的这种现象。100 个测试的速率为 10/5000 帧。
帧周期稳定、两个雷达之间的距离超过 1 米。
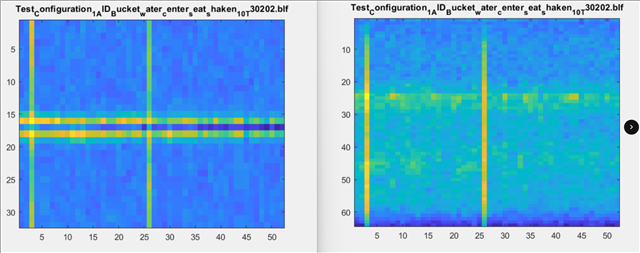
普通场景数据: