请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWRL6844工具/软件:
尊敬的 TI 团队:
我对 AWRL6844 的天线校准有疑问。 我们的团队将在中使用 6844 相关应用 RADAR_toolbox_3_20_00_04 。
在该range_phase_bias_measurement.c文件中、为什么将收集的数据乘以该bpmsign值(如所示) 图 1. )? 所有配置(包括 ID、CPD 和 SBD)都在使用 TDMA 消耗量。
此外、您能否确认环路是否进入 图 1. 不正确? 根据目前的执行情况、该指数似乎没有根据而变化 TX 天线索引 (来自 RadarCube )
最后、为什么在时不允许校准 干扰消除 是否已启用? 使用的数据来自 RadarCube —这是否会影响结果?
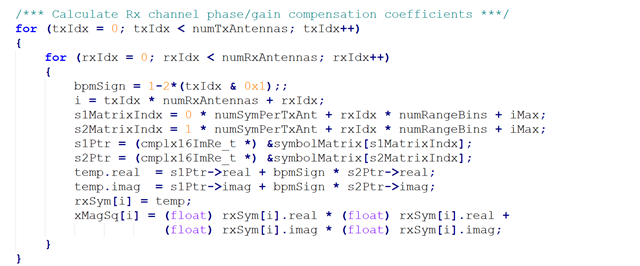
图 (1)
抱歉、我 想问一些问题。
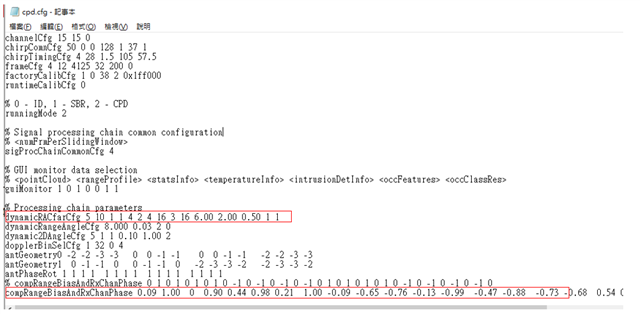
In dynamicCfarConfig setting:
是的乘积 方位角尺寸 和 仰角尺寸 用作fft2DSize?
如果是、这是否会导致信号不连续并可能影响检测性能?
感谢您的帮助。
Henry Lin