Thread 中讨论的其他器件:AWRL6432、
工具/软件:
该手册说明了 rl_fecssDevClockCtrl API 中 c_DevClkCtrl 参数的值、如下所示:
应用可以根据电源状态将 FECSS 的时钟源切换到 XTAL 时钟或快速时钟、或者可以门控 FECSS 系统时钟。
建议的 FECSS 时钟状态:
XTAL 时钟–短空闲时间。
快速时钟–数据采集模式、校准或监测。
时钟选通–长帧空闲时间。
我对这一描述有几个问题、因为我想澄清设置这些值的目的和条件。
Q1) 在正常雷达控制操作中、假设选择快时钟就足够了、
为了在 FECSS 空闲时间内降低功耗、XTAL 时钟和时钟门是需要考虑的选项?
Q2) 我想清楚地了解可以选择 XTAL 时钟和时钟门的条件。
mmwave_DFP_LOW_API_documentation 介绍了典型的用例编程序列。
在这些序列中、RL_fecssDevClockCtrl API 在四种状态下执行。 在以下哪些状态下、可以选择 XTAL 时钟和时钟门?
初始化状态
-FeCSS 断电状态
-取消初始化状态
-warmBoot FECSS 状态
【编程序列参考】
mmwave_DFP_LOW_API_documentation
{SDK_INSTALL_PATH}/firmware/mmwave_dfp/docs/mmwave_dfp_low_api_documentation/MMWAVE_LINK_DOC.html
章节:现场操作
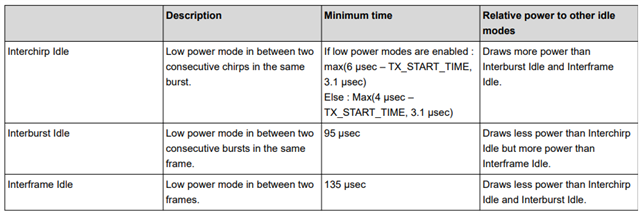
问题 3) 能否解释“短空闲时间“和“长帧空闲时间“的时间限制?
我想分析在什么条件下可以选择 XTAL 时钟和时钟门。
Q4) 选择 XTAL 时钟或时钟门时是否有任何其他先决条件或限制?
【参考】
MMWAVE_L_SDK_05_05_03_00
mmwave_dfp_interface_control_document.pdf
第 2.3.14 节 FECSS 器件时钟控制 API