请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR2944主题中讨论的其他器件:Sysconfig、 MATHLIB、 AWR2544
工具/软件:
您好、
我的 SDK 是 mmwave_mcuplus_sdk_04_07_01_04
其他环境如下所示:
MCU_PLUS_SDK_awr294x_10_01_00_04
CCs2030
SYSCONFIG_1.23.0
TI-CGT-armllvm_4.0.3.LTS
TI-CGT-C6000_8.5.0.LTS
MMWAVE_DFP_02_04_18_01
DSPLIB_c66x_3_4_0_0
mathlib_c66x_3_1_2_1
xdctools_3_62_01_16_core
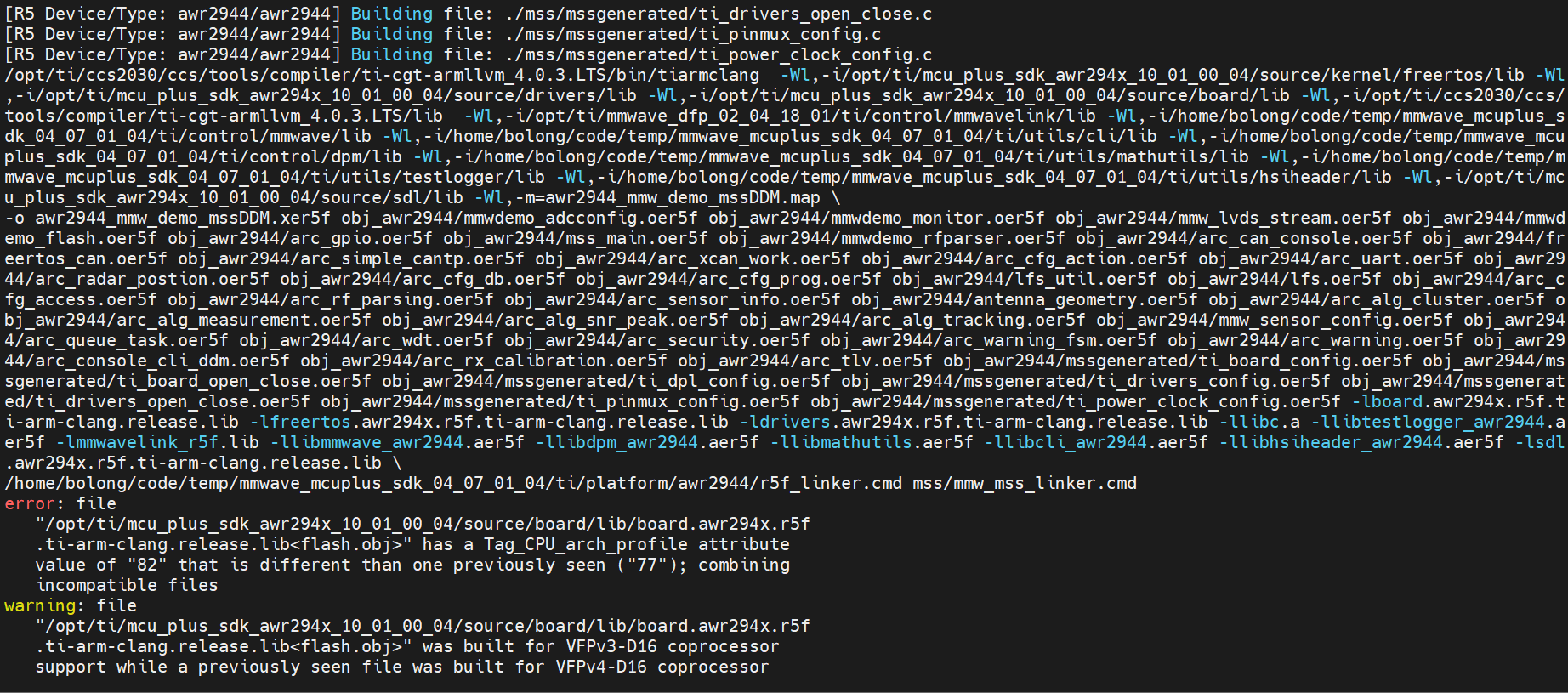
请帮助检查错误消息的含义?