

Other Parts Discussed in Thread: AWR1843BOOST, AWR1843
器件型号: AWR1843
大家好、
希望你们做得好。
我当时正在使用 AWR1843BOOST 雷达 EVK、并尝试通过 CAN 获取雷达数据。 在 E2E 论坛上进行了一些研究后、我发现中距离雷达的默认预编译二进制文件已经在 AWR1843BOOST 中初始化了 CAN。 如果我错了、请纠正我。
当前我正在使用此文件目录-
“c\ti\radar_toolbox_4_00_00_05\source\ti\examples\Automotive_ADAS_and_Parking\medium_range_radar\prebuilt_binaries\xwr18xx_MRR_demo.bin"。“。
测试设置-
SOP 模式(功能模式):SOP2=0、SOP1=0、SOP0=1
SPI CAN 接口多路复用器 (TS3A5018RSVR IC) 选择开关:CAN
CAN 到峰值连接:CAN_LOW、CAN_HIGH 和 GROUND
我使用 具有 CANFD 的 PEAK USB 适配器通过 CAN 将雷达连接到我的 PC。我最初尝试 使用上述 xwr18xx_mrr_demo.bin 刷写雷达、并检查 TI CAN 可视化工具上的数据。 当我检查 TI CAN 可视化工具上的数据时、只有在初始化 TI CAN 可视化工具后、消息阅读器盒上才会出现“状态消息类型“。 我在下面附上了一张图片供您参考-
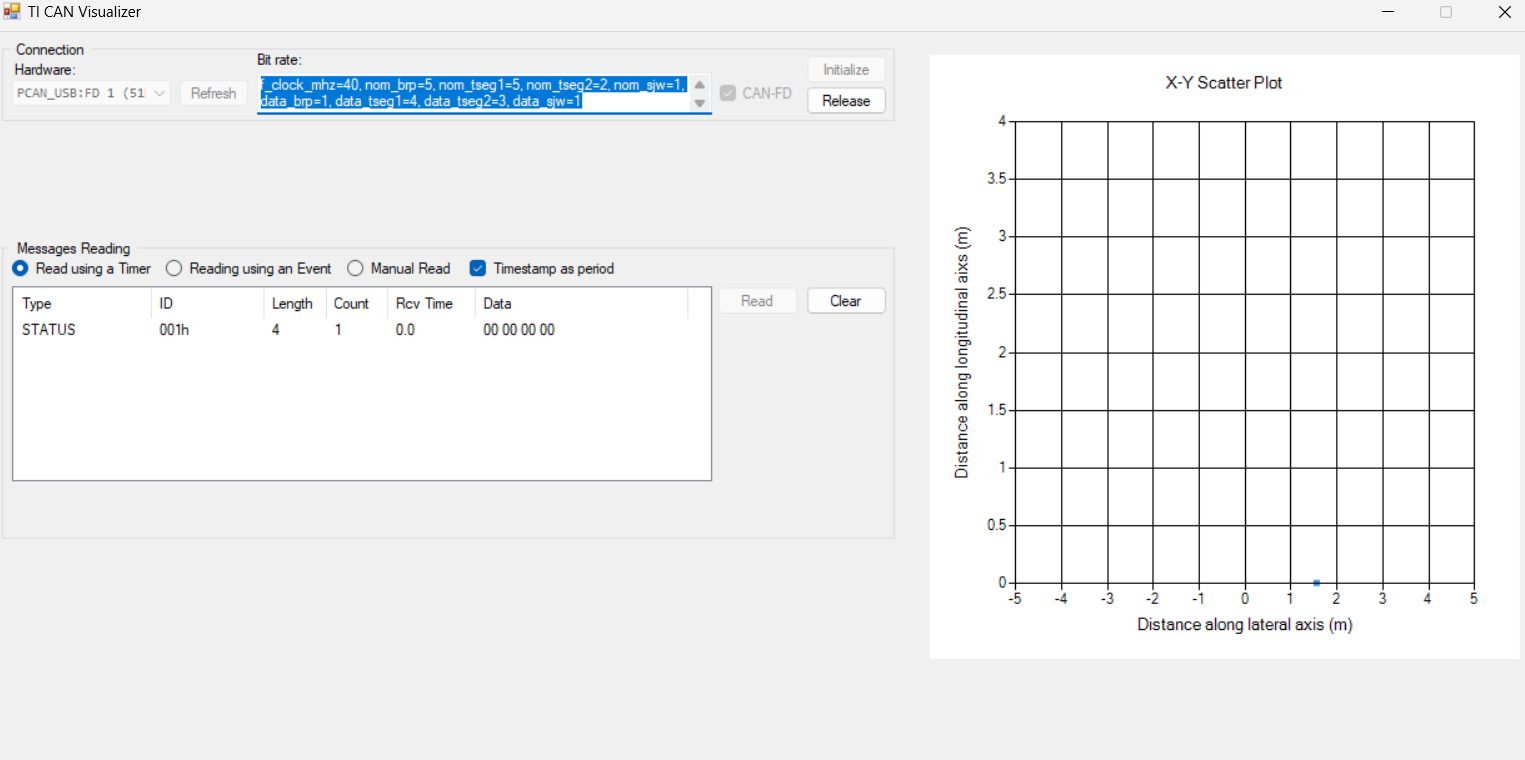
现在、当我重启雷达时、同时保持 TI CAN 可视化工具初始化会在消息对话框中打印一些数据以及“状态消息“。 但仍然没有绘制点。 打印一些数据后、 消息阅读器框中的数据停止更新。 仅当我在保持 TI CAN 可视化工具初始化的情况下对雷达进行下电上电时、数据才会更新。 如果我必须对默认比特率配置进行任何更改、请告知我。 我 尝试过玩比特率,但我坚持 在同一个问题上只有. 为了更好地理解、我附上了下面的图片- 
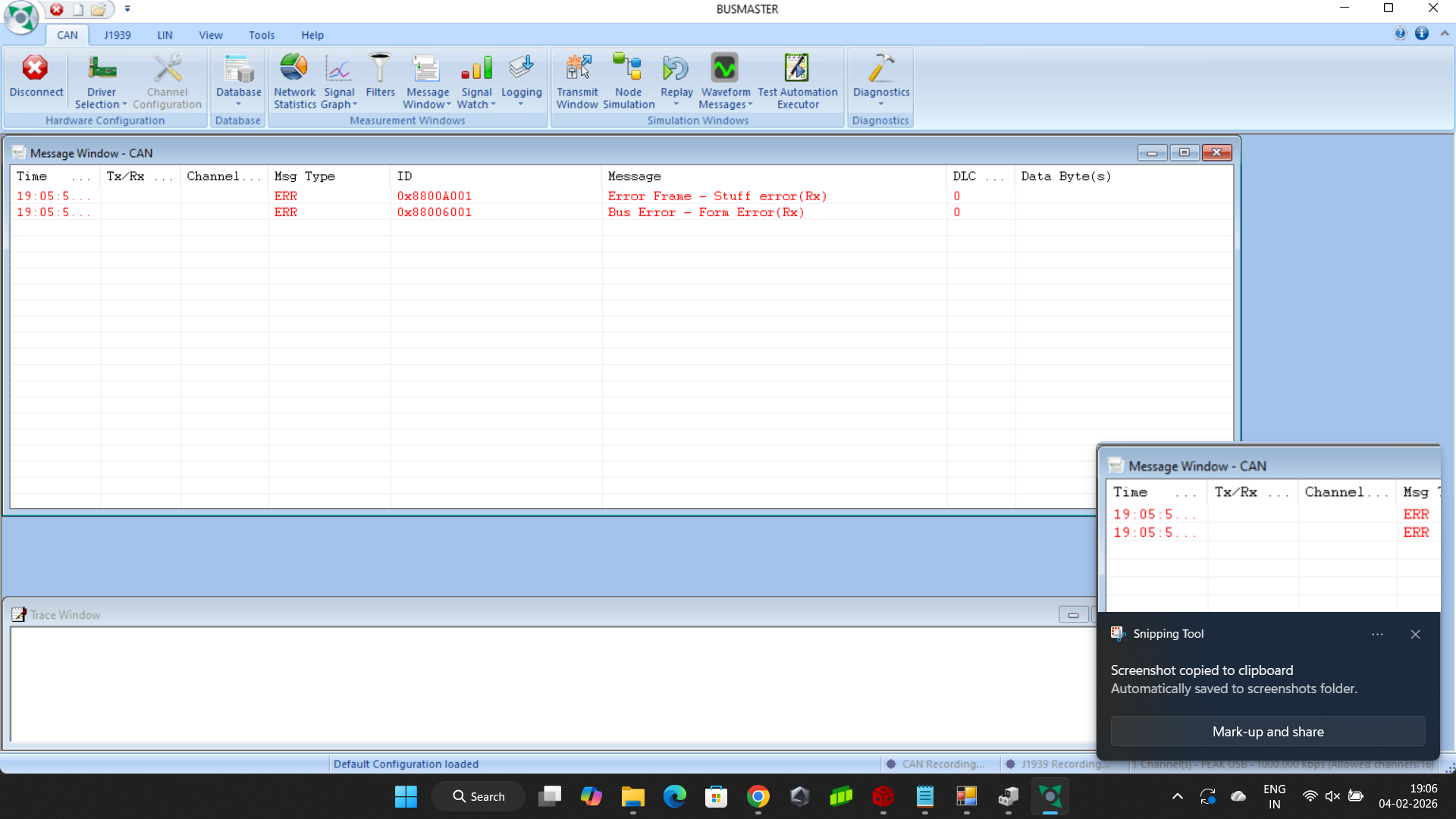
在下一步中、我尝试使用 Busmaster 检查 CAN 数据、在那里我遇到 了错误“错误帧 — 填充错误 (Rx)“。 经过一些检查,我发现 当一个节点检测到六个或更多相同极性的连续位时,就会发生这种错误,违反了标准的位填充规则。 我尝试玩周围的配置和比特率在 Busmaster 以及 ,但没有运气。 我将分享以下图像以供您参考-
以下是查询,我有:
1.我正在使用的“xwr18xx_MRR_demo.bin"预“预编译二进制文件是否 默认通过 CAN 支持 AWR1843BOOST 板的数据?
2.是否有任何特定的比特率或配置,我应该遵循通过 CAN 获取数据?
3.请告诉我,如果存在任何预编译二进制或 CCS 项目,除了 xwr18xx_mrr_demo.bin 之外,默认情况下支持通过 CAN 传输的数据。
4、如果您可以通过对 mss_main.c 进行任何修改来帮助我们解决错误“错误帧 — 填充错误 (Rx)“、以及如何将 CAN 功能从 CAN-FD 更改为传统 CAN 更改为 mss_main.c。
另外、如果您需要任何其他信息、请告知我。
提前感谢您帮助解决问题。
此致、
Ratul


