Other Parts Discussed in Thread: MMWAVEICBOOST, AWR2243, IWR6843, IWR6843ISK
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号: IWR6843ISK
主题中讨论的其他器件: IWR6843、MMWAVEICBOOST、 AWR2243、AWR2243 至 3X-CAS-EVM
IWR6843:难以获取静态物体的密集点云(自上而下设置)
您好:
我目前正在使用 IWR6843ISK + mmWaveICBoost 进行测试。
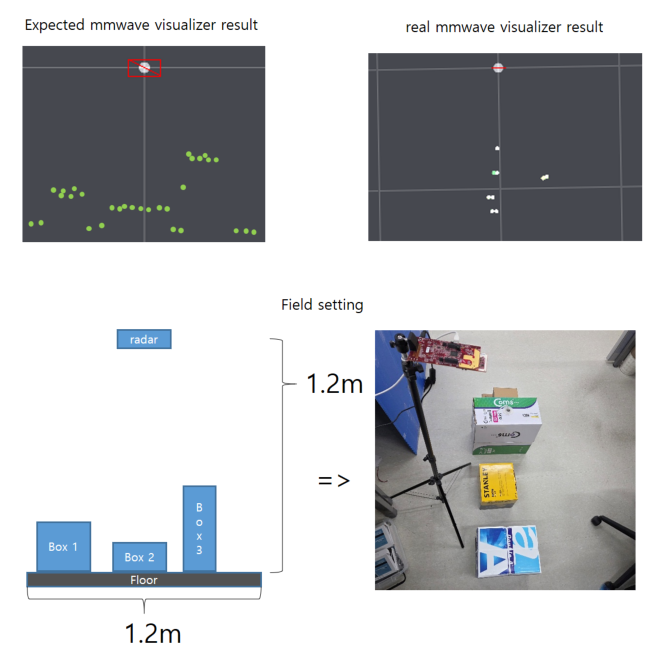
如随附的图所示、雷达垂直安装在地面上、覆盖面积约 1.2m× 1.2m(宽×高)。
我的目标是获得一个表示静态框实际形状的点云地图、类似于激光雷达点云所示的形状。
我无法获得一个令人满意的点云,它能清晰地代表静态物体的形状。
在许多情况下、检测到的点稀疏、不稳定或者与框的实际几何形状不相似。
我不确定这主要是由于参数配置、算法限制还是演示选择不合适。
我的问题如下:
1.演示选择
除了标准的开箱即用演示之外、毫米波工具箱中是否还有任何其他更适合的演示:
-静态物体检测
-区域/表面扫描
-获取固定目标的密集点云
(我已经测试了区域扫描仪和移动跟踪器演示,但它们没有完全满足我的要求。)
2.是否有从自上而下的角度查看静态或近静态对象的建议.cfg?
提前感谢您。