

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMAG5231 在本示例中,我们将模拟类似于消费型笔记本电脑用于机盖位置感应的机械铰链运动。 这种实施的优点包括小型设计和易于组装/实施。 无论磁体向北或向南,使用小肺泡开关都可以在 BOP 和 BRP 上实现相同的输出。 由于磁体不需要以一种特定的方式定位,设备才能正常工作,因此选择的小电极开关使机械系统的组装变得更加容易;传感器也不需要调整或编程,就可以与特定磁体的北极/南极方向配合使用。
在该工具中,我们将实施一个向北或向南的块状磁铁,它在一个小肺泡开关附近的200mm 圆弧半径铰链上移动。 磁铁是一个 N35块,长度为2.5毫米,宽度和厚度为5mm。 位移尺寸范围为20度(D1)至0度(D2),带-8mm 传感器 Z 偏移。 将使用 SOT-23封装中的 TMAG5231B1小肺泡开关进行模拟。 为了证明小肺泡开关的工作特性,将为北向和南向磁体生成结果。 图1表示面向南的磁体的配置设置,图2表示面向北的磁体。 在工具中输入所需的配置设置,并通过选择“计算 B 字段和输出”来生成模拟结果。
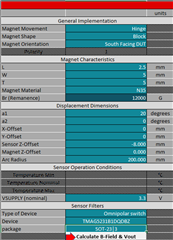
图1:面向南磁铁的实施
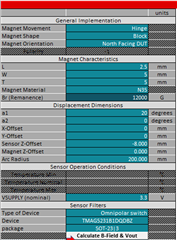
图2:磁体的北向实施
图3显示了转轴仿真的物理运动。
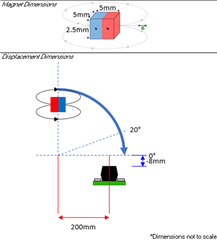
图3:模拟移动表示法
以下波形代表传感器输出和相对于铰链角度绘制的 B 字段。

图4:面向南磁铁输出结果

图5:北向磁铁输出结果
如图4和图5所示,无论磁体 N/S 方向如何,本小肺泡设备的输出结果都是相同的。
有关铰链过渡检测的其他信息,请参阅本应用简介,主题为:使用霍尔效应传感器进行过渡检测
上一个常见问题解答,第二部分:使用比率 PWM 传感器模拟逐向移动
