

Other Parts Discussed in Thread: DRV5057
对于第二个示例,我们将通过类似于模拟调光开关中的运动模拟机械滑块。 此实施的优点包括 PWM 输出信号,并且没有机械磨损的项目。 通过使用此霍尔传感器,PWM 输出可以馈入微控制器,而无需 ADC 或外部信号链组件。
在模拟中,我们将在线性 PWM 比率霍尔传感器附近实施一个面向 NS 的气缸磁铁移动滑轨。 磁铁是一个 N42气缸,半径为5mm,厚度为5mm。 位移尺寸范围为-10mm (D1)至10mm (D2),与封装中心没有 X 或 Y 偏移。 DRV5057A 比率 PWM 输出霍尔传感器将用于模拟。 或者, 如果需要模拟输出,可以使用 DRV5055A。 图1显示了模拟的输入配置。 在工具中输入所需的配置设置,并通过选择“计算 B 字段和输出”来生成模拟结果。
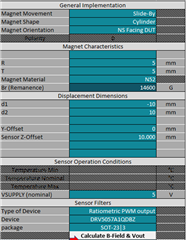
图1:幻灯片磁铁实施
图2显示了逐张幻灯片模拟的物理运动。
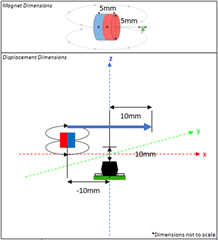
图2:模拟移动表示法
对于复杂的磁体形状(如圆柱和球形),FEMM 将用于磁场模拟。 选择“计算 B 字段和输出”后,将出现一个弹出窗口,要求为 FEMM 项目命名,并为结果选择文件位置。 填写这些字段,然后选择“下一步”。
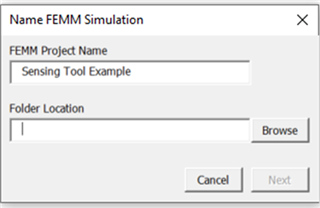
图3:FEMM 模拟文件夹位置
选择弹出窗口中的“打开 FEMM”开始模拟。
模拟结束前,将出现一个弹出窗口,允许用户保存 FEMM 模拟中的通量密度图解图像。
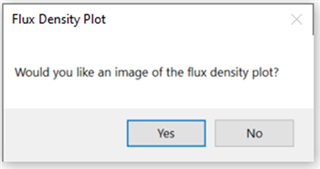
图4:助熔剂密度图解提示
选择“关闭 FEMM”以在 Excel 中查看结果。
图5:FEMM 关闭提示
以下波形代表与水平磁铁位置相关的传感器输出(以% PWM 为单位绘制)。

图6:DRV5057输出结果
如图6所示,PWM 占空比随水平磁铁位置而变化,从大约25%到75%的占空比不等。 模拟 PWM 范围可通过设备选择或通过改变模拟的磁性特性来调整。
有关滑轨传感的更多信息,请参见本应用简介,主题为:使用线性霍尔效应传感器跟踪滑轨位移
上一个常见问题解答,第一部分:使用单极开关模拟头戴式移动。
接下来的常见问题解答,第三部分:使用 Omnipolar 霍尔效应开关模拟转轴移动
