

主题中讨论的其他器件: TMAG5273
机器人机制需要对设置和控制行为进行编程响应才能完成特定任务。 这些任务从移动运输到稳定性控制或制造和装配作业不等。 机器人在每种情况下的运动都通过电机驱动机制进行控制、电机驱动机制可以通过齿轮箱、皮带、螺钉或齿条和小齿轮等其他方式直接驱动或耦合到系统。
在所有情况下、电机轴的旋转都与系统耦合。 在任何应用中、了解电机转轴位置与整体系统行为的关系都是至关重要的、原因有很多。
- 可靠的位置控制、实现一致的系统控制
- 降低了系统、附近物体和人员损坏或受伤的风险
- 改进了功能的同步和定序、以实现更快的响应
这些因素会影响自主移动机器人在仓库或执行装配任务的六轴机械臂的精度和可重复性方面的指导程度。 虽然位置信息可从用于电机换向的传感器中逐渐获得、但通常需要更高的精度才能产生一致的行为。 角度编码通常用于跟踪电机轴的位置、以提供所需的精度。
角度编码解决方案
要测量电机轴的绝对角度、编码器必须对电机轴本身执行测量。 大多数机器人应用都需要通常 使用磁传感或光学编码获得的绝对位置信息。 为了可靠地运行、光学编码器需要笨重的外壳来保护传感器免受灰尘、灰尘或其他污染物的影响。 此外、这些解决方案必须与电机轴进行机械耦合、并且可能会受到运行速度的限制。 磁感应传感和感应传感都能够应对这两个挑战。 在将磁体连接到电机轴的情况下、可以通过测量磁场来确定角度位置。 有关此测量的更多信息、请参阅 《使用霍尔效应传感器进行旋转运动的绝对角度测量 》应用简报。
磁传感
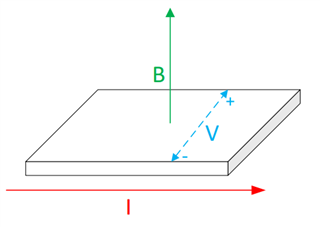
标准霍尔效应磁传感器本质上是一个维度。 霍尔效应测量由 Lorentz 力引起的载流元件中的电压差。 本质上、施加的磁场、电流和电压是相互正交的。 因此、单个器件只能测量三维磁场的一个分量。
要使用反正切函数有效测量360度全旋转的角度、需要使用两个分别为90度的感应元件。 使用标准一维传感器的结果排列如下所示 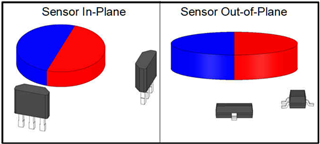
虽然这种感应磁体位置的方法确实提供了所需的输入、但它需要对旋转磁体的两个传感器进行物理隔离。 每个传感器必须与磁体小心对齐、以实现最高质量的输入。 克服这一挑战通常需要仔细组装。 表面贴装器件可能会在回流焊过程中自定位时旋转、而通孔组件在组装过程中需要使用 JIG 或间隔器、以确保高度和对齐一致。 即使在焊接过程中实现了理想对齐、对器件施加的力也可能会弯曲引线并产生非理想对齐。 因此、TMAG5170或 TMAG5273等单片3D 霍尔效应传感器是机器人位置编码器的出色选择。 这种类型的器件能够测量和报告 B 场矢量的每个单独组件、如下所示:
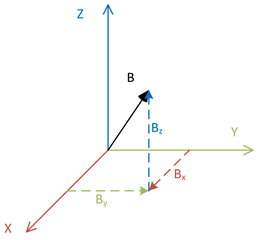
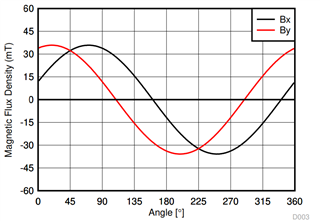
在监控每个组件时、旋转磁体自然会向传感器提供相位差为90度的输入。
当使用3D 霍尔效应传感器时、用于测量磁场的霍尔元件在同一芯片内是相互正交的。 因此、在查找角位置时、较小的焊接错位会更容易受到原谅、因为感应元件始终保持彼此对齐。 当使用集成到单个芯片中的传感器时、灵敏度匹配也会得到改善、因为它们在制造过程中会遇到类似的情况。 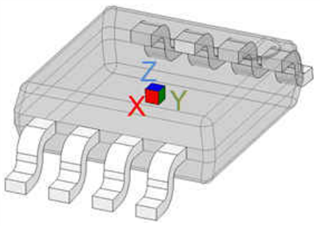
现在只有一个封装需要对齐、磁体的放置更加灵活。 可以使用安装在轴通孔上的环形磁体或标准圆柱形磁体的末端。 该传感器可以方便地放置在磁体范围内可访问的任何位置、以实现紧凑的编码解决方案。 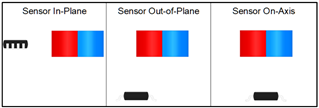
此系列器件的另一个巨大优势是能够通过数字接口将数据发送回微控制器。 由于数字数据更难损坏、因此在通过线缆传输时、干扰电气噪声不是很重要的问题。 循环冗余校验(CRC)为所有读取操作提供了对信号完整性的信心。 这也允许远程放置微控制器、从而提高机械设计的多功能性。 TMAG5170还能够在正常运行期间运行自诊断。 其中包括检查内部存储器、VCC 状态、内部 LDO 状态、输出引脚电压、温度、 和其他器件功能验证。 此功能提供有关器件状态的实时信息、以帮助指导可能影响可靠性或安全性的系统操作。
有关机器人中霍尔传感器的更多信息和详细信息、请参阅以下内容:
| 名称 | 说明 |
| 使用多轴霍尔效应传感器进行角度测量 | 详细介绍使用 TMAG5170进行角度测量的应用手册 |
| 使用线性电机运输系统进行多动子位置感测 | 应用简报、描述了线性电机传输系统中的运动反馈 |
| 使用霍尔效应传感器测量旋转运动的绝对角度 | 应用简报介绍了使用霍尔效应磁传感器进行角度测量的方法 |
| TIDA-060040 | 参考设计和测试结果、演示了使用1D 和3D 霍尔效应传感器在各种对齐配置中的角度精度和校准。 |
| TMAG5170UEVM | GUI 和附件采用精确的三维线性霍尔效应传感器进行角度测量 |
| TMAG5273EVM | GUI 和附件采用三维线性霍尔效应传感器进行角度测量 |
| DRV5055EVM | EVM 包含一个数字显示屏、其各种灵敏度均沿直尺面线性对齐。 |
| TI 高精度实验室-磁传感器 | 介绍霍尔效应及其在各种应用中的使用方式的有用视频系列 |
