

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843 您好,
我正在使用 mmWave SDK 版本3.5.0.4测试自主机器人 ROS (工业工具箱版本:4.10)
我使用具有 ROS 的自主机器人进行毫米波设置。
Turtlebot 成功地启动了主机计算机的远程控制。
实际情况设置为 pico 1
 Pico 1
Pico 1
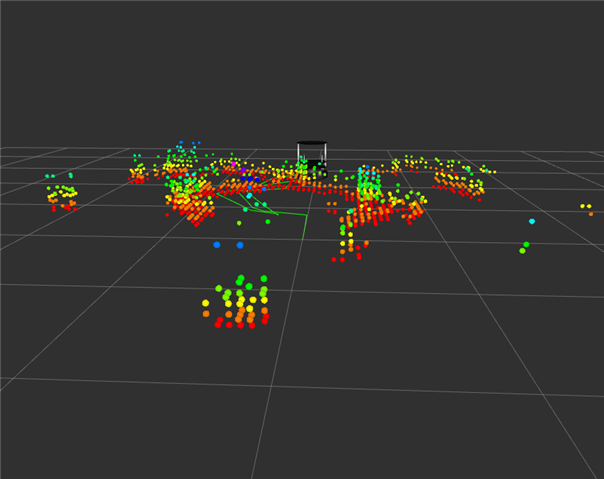
映射演示以"没有要发布的内容、octree 为空"运行、 我使用键盘向障碍物移动、转弯和执行圆形移动。 然后、映射显示为 pic2、绿色线是路径。
我试图获得一张清晰的图、上面显示了 Turtlebot 的周围环境。 但设置的结果似乎有问题、为什么会在空白区域出现点云?
 Pico 2
Pico 2
谢谢、
此致、
交通
