请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 主题中讨论的其他器件:IWR6843、
你(们)好。
我们正在开发基于 IWR6843ISK 的项目。 目的只是测量移动物体与雷达器件之间的距离。 但是、与 这些 常见的工作条件相比、工作条件有些特殊。 假设 物体 以 大约800rpm 的速度极快地旋转、并且其形状非常薄(宽度大约30cm)、这会导致测量物体与雷达之间最短距离 的时间间隔小于1ms (根据计算、大约为0.7ms)。 每个帧的持续时间应小于此时间间隔、以便每次物体扫过雷达时、至少可以执行一次测量。 不 需要多普勒或 AoA 估算等其他雷达数据处理过程。 是否可以使用 IWR6843进行如此快速的测量? 或有关上述描述的任何建议?

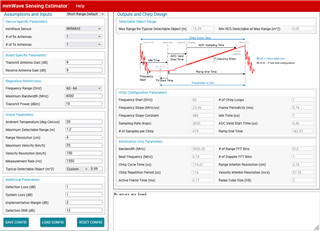
这是使用 mmWaveSensing估算 器的结果。
Thx
沈