请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6443 主题中讨论的其他器件: IWR6843AOP
您好、支持团队、
使用 IWR6443是否可以实现以下目标?
°范围为2 μ A
2.检测精度:4~5m 距离时为2~3cm (最大10cm)
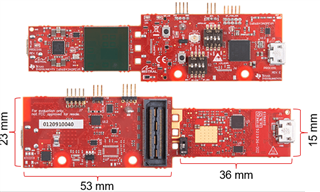
3.安装空间,带天线:3~5cm 方形
此致、
Takahashi Hirokazu
您好、支持团队、
使用 IWR6443是否可以实现以下目标?
°范围为2 μ A
2.检测精度:4~5m 距离时为2~3cm (最大10cm)
3.安装空间,带天线:3~5cm 方形
此致、
Takahashi Hirokazu