

主题中讨论的其他器件:DRV5055、 TMAG5273
在位置感应应用中使用霍尔效应传感器的一个主要优势是它消除了在机械解决方案中确定位置所需的物理接触。 这是由于附近磁体的磁通量磁导率导致的、线性霍尔效应传感器可以使用磁通量来产生随输入磁场变化而变化的输出。 磁场穿透空气、灰尘和污垢、塑料以及其他一般非铁磁性材料。 因此、可以方便地将传感器放置在存在可测量磁场的任何位置以提供反馈。 使用线性输出霍尔效应传感器时、存在的一个特殊挑战是磁通密度与磁体距离的平方成反比。 因此、由于线性步进会在输出上产生非线性变化、这会增加位置计算的复杂性。 虽然这可以针对任何特定磁体进行校准、但一种有用的配置是以滑动配置对磁体和传感器进行定向。 在这里、磁体不是直接向传感器行进、而是以线性路径在传感器上方移动。
例如、考虑一维传感器的布置、例如图1所示的 DRV5055、磁体沿与 Y 轴平行的黑色线沿任一方向移动。 在此示例中、图中的磁体厚度约为22mm、半径约为3mm。
图1 -磁体滑动方向
在此配置中、传感器将仅检测沿 Z 轴方向的磁场矢量分量。 在该磁体的整个行程中、生成的传感器输入具有有趣的行为。 存在一个与磁体长度大致相同的区域、该区域会在磁场中产生线性变化。 使用该输入、现在可以通过在线性输入区域中进行测量来更轻松地监测位置变化。

图2 -滑动输入磁场
此外、通过添加多个传感器、还可以轻松地对其进行调整、以增加整体行程长度。 线性霍尔效应传感器阵列设计中更详细地讨论了此类设计涉及的过程。
一维情况的范围受磁体长度的限制。 在线性输入区域之外移动会产生位置不确定性、因为现在有两个位置映射到相同的输入幅度。 而是使用三维3D 传感器来解决不确定性。 使用此传感器类型、可以观察到图3所示的输入字段。
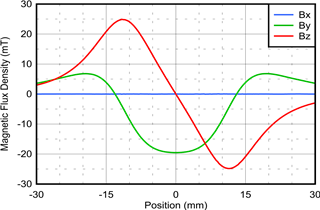
图3 - 3D 滑动输入场
使用此输入、可以定义三个不同的输入区域。 线性区域仍然为线性运动提供最佳相关性、但根据 Y 分量、现在也可以区分非线性区域中磁体的方向方法。 假设为 By 设置了-6mT 限值、以对应于 BZ 的峰值。
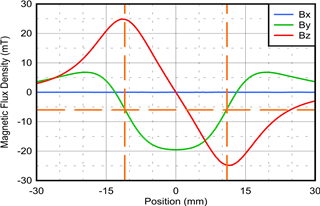
图4-输入磁场区域
当 By 超过此阈值时、已知磁体处于线性感应区域。 对于低于阈值的 By、BZ 的符号将指示该方法是从右还是从左。 校准可用于确定该非线性区域中的位置、并且随着磁体距离传感器的距离进一步移动、精度将降低。
类似且有利的方法将再次利用3D 传感器、但这次磁极将定向到传感器表面、而不是平行。 磁体行程上的磁场分布与上一个示例非常相似。
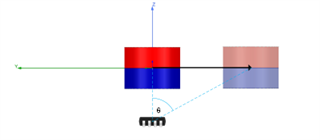
图5 -滑动机械角度
当磁体沿 Y 轴移动时、该运动将产生输入、如图6所示。 在这种情况下、磁体比以前小得多、大约厚度为5mm、半径为3mm。 由于磁体的方向发生变化、现在可以在 By 分量上观察到线性区域。 此特定情况下该区域的宽度仅为6mm。
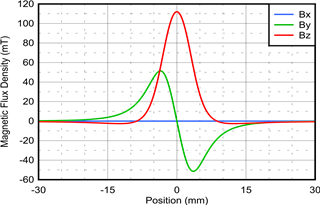
图6 -角度测量输入
使用此数据、只能使用 By 来跟踪位置、但使用反正切函数将在更宽的范围内实现位置检测。
电角:θ= atan 2 (BZ、By) 1.
通过比较基于磁场输入计算得出的电角与磁体和传感器之间的实际机械角、可以发现一种有趣的行为。
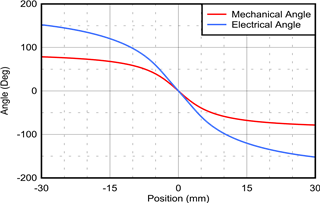
图7 -测量角度与位置间的关系
虽然由于使用磁场输入而不严格遵循正弦行为、这两种计算之间存在显著误差、但很明显、一般形式的电角计算遵循机械角的行为。 鉴于此相似性、应可以调整电气计算以匹配实际机械角度。 使用 TMAG5170时、可以对单个通道同时应用增益校正和偏移校正、这两个通道分别表示为 α Ω 和 δ Ω。 此外、第二个标量显然有助于降低总体幅度。 该标量将由 β 表示。 此校正将由记录 TMAG5170输出的微控制器进行。 更深入的分析还表明、随角度增大的比例因子 γ 也有助于在最远的磁体位置对齐两条曲线的渐近行为。 公式2和公式3中显示了基于公式与每个因素对齐的示例。
θ′= atan2 (α×(BZ +δ),By) 2.
θ=β×θ′−γ×sin θ′ 3.
要实现此功能的演示、请考虑图8所示 TMAG5170 EVM 的附件。 TMAG5170滑动附加装置中提供了启用3D 打印此附件和物理几何体的文件。
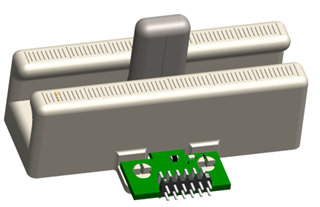
图8 - TMAG5170滑动附加装置
根据仿真数据以及公式2和公式3的结果、有多种可能的实现方案、其精度也相应。 这些值和相应的误差是通过检查确定的。 其他线性化方法、包括多点校准、也可以证明是线性化结果的成功方法。 以下示例中显示了三种配置。 配置1对 Z 轴应用标量校正、然后缩放产生的角度输出的幅度。 配置2也使用这些因素、但包括额外的有意偏移、以帮助扩展灵敏度范围。 为了进一步限制误差、配置3添加了最终校正因数、以帮助进一步扩展传感器的可视范围、使输入参考噪声 有可能成为影响位置精度的主要因素。
表1. 配置和测量范围
|
配置 |
α μ A | β μ A | Δ μ A | γ μ A | 范围 | 精度 |
| 1 | 0.6075 | 0.786 | 0 | 0 | +/- 11mm | +/- 0.06mm |
| 2. | 0.6145. | 0.795 | 0.43. | 0 | +/- 21mm | +/- 0.25mm |
| 3. | 0.534 | 0.87 | 0.24. | -7.25. | +/- 23mm | +/- 0.1毫米 |
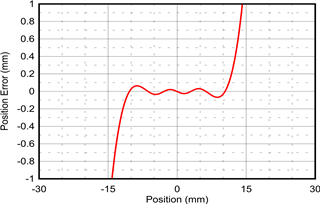
FIGUE9 -配置1
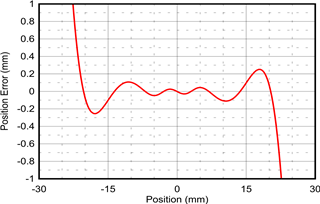
图10 -配置2
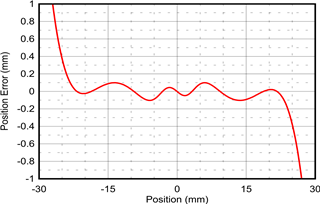
图11 -配置3
还必须记住、这些结果可能因系统而异、因为灵敏度误差、失调电压、噪声和机械变化都会影响这些结果、而这些结果是理论上的最佳情况行为。 可以实施额外的校准系数来提高总体精度。
表2. 备选器件建议
| 器件 | 特性 | 设计注意事项 |
| DRV5055 (DRV5055-Q1) | 具有模拟输出、采用 SOT-23和 TO-92封装的商用(汽车)单轴双极性线性霍尔效应传感器 | 模拟输出受电气噪声影响、计算需要 MCU 计算。 单轴灵敏度限制了在自由空间内跟踪运动的能力。 |
| DRV5057 (DRV5057-Q1) | 具有 PWM 输出的商用(汽车)单轴双极性线性霍尔效应传感器、采用 SOT-23和 TO-92封装 | PWM 输出需要转换、但不太容易受到耦合噪声的影响。 单轴灵敏度限制了在自由空间内跟踪运动的能力。 |
| TMAG5170 (TMAG5170-Q1) | 具有 SPI 接口、采用8引脚 DGK 封装的商用(汽车)级线性3D 霍尔效应位置传感器 | 完全磁矢量灵敏度。 该器件能够跟踪多种磁体位置、但仍需要仔细规划以确保所有输入条件都映射到唯一的位置。 |
| TMAG5273 | 具有 I2C 接口的线性3D 霍尔效应位置传感器、采用6引脚 SOT-23封装 | TMAG5170具有更严格的灵敏度容差、TMAG5273在 I2C 上运行 |
表3. 相关技术资源
| 名称 | 说明 |
| 线性霍尔效应传感器阵列设计 | 用于跟踪长路径运动的传感器阵列设计指南 |
| 线性霍尔效应传感器简介:实现非接触式精确位置感应 | 讨论线性输出和开关输出霍尔效应传感器之间的差异。 |
| 什么是霍尔效应传感器? | 讨论霍尔效应及其如何用于创建磁传感器 |
| TMAG5170UEVM | GUI 和附件采用精确的三维线性霍尔效应传感器进行角度测量 |
| TMAG5273EVM | GUI 和附件采用三维线性霍尔效应传感器进行角度测量 |
| DRV5055EVM EVM | EVM 包含一个数字显示屏、其各种灵敏度均沿直尺面线性对齐。 |
| TI 高精度实验室-磁传感器 | 介绍霍尔效应及其在各种应用中的使用方式的有用视频系列 |
