

Other Parts Discussed in Thread: IWR6843ISK
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 您好!
我使用 DCA1000+IWR6843ISK+MMWAVEBOOST 板和 mmWave Studio 来收集原始数据。
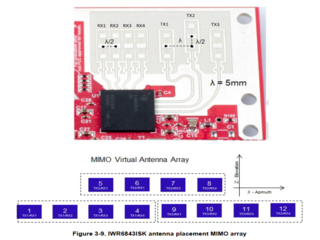
雷达配置:启用3个 Tx 和4个 Rx,具有 BPM MIMO。 因此、有12个虚拟天线。
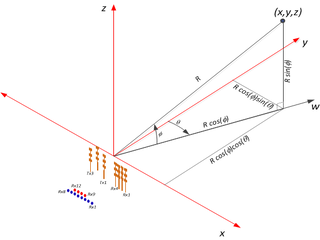
我正在尝试使用 Barlett 和音乐方法计算方位角和仰角。 为此、首先需要确保使用 Steering vercor 公式。
我有2个问题、
- 根据我的理解、转向矢量计算应该是这样的、
SteeringVector = e^(-1*PI*(DX*sin (方位角)*cos (仰角)+ dy*cos (方位角)*cos (仰角))) 、其中-60<=方位 角<=60、-15<=仰 角<=15、
array_DX =[0 1/2 1 3/2 1 3/2 2 5/2 2/2 5/2 3 7/2]; //这基于下图的顺序。 紧随图像中虚拟天线的声码。
array_dy =[0 0 0 0 0 1/2 1/2 0 0 0 0] ; //此处与下图中的虚拟天线阵列位置相同。
是这样吗?
- 我正在考虑使用12个虚拟天线来计算该转向矢量。 这是正确的方式吗? 或者、我是否应该仅考虑8个不是[3、4、5、6、7、8、9、10]的虚拟天线? 还是其他东西? 我将根据这2幅图像进行计算。 图像如下所示。
我期待你的答复。
谢谢你。
此致、
Nazmul
