请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK-ODS 主题中讨论的其他器件:IWR6843
你好
我们使用 iwr6843 ES2.0、SDK 版本为3.4.0.3。
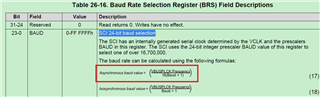
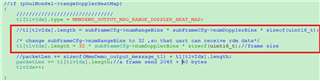
如果 config uartParams.budrate = 1843200 或 uartParams.budrate = 1920000、则在接收 UART 数据时发现存在位丢失问题。
我想它可能与 UART 发送的数据有关。
请提供一些建议以帮助我们验证问题、谢谢。