请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LDC1000
您好!
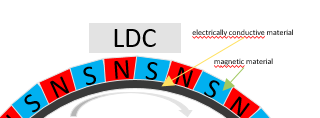
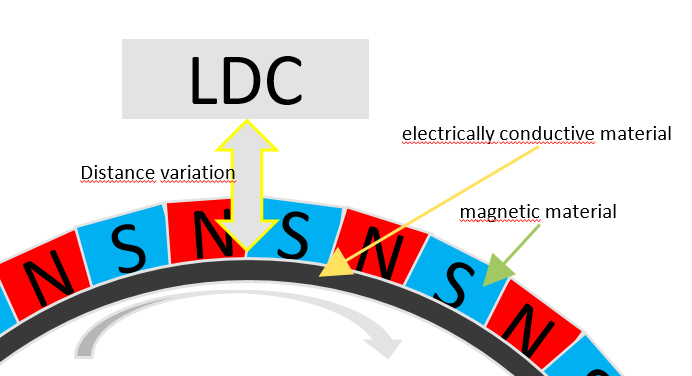
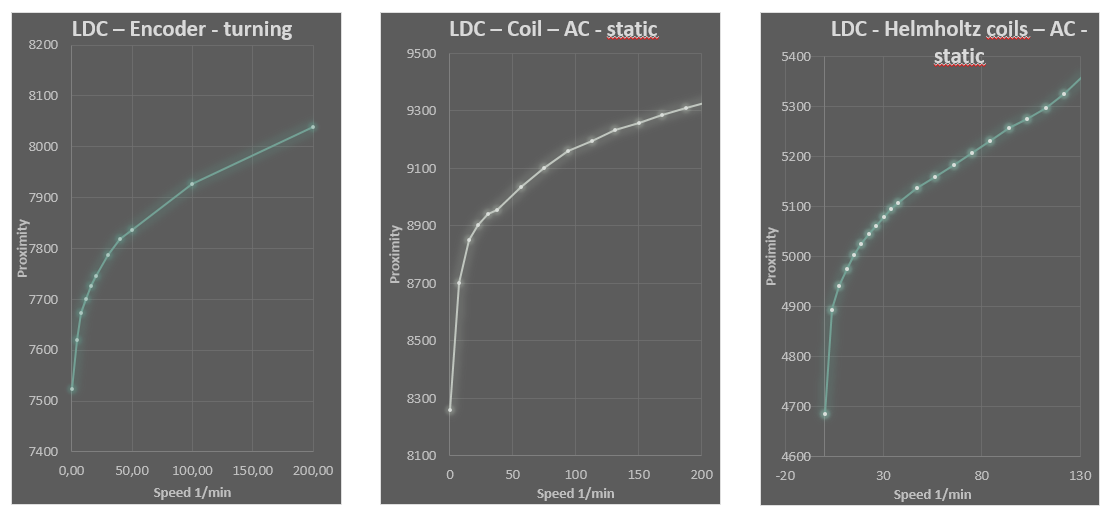
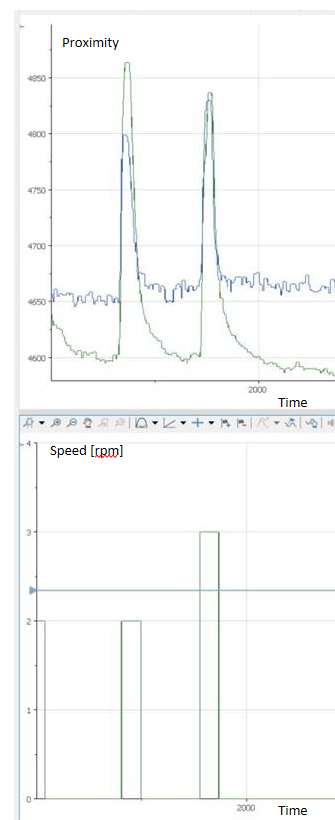
当我们的磁性编码器环开始转动时、我们会看到以下效果。 您能解释一下这种行为吗?
我希望切换到后续芯片 LDC1001时也会发生相同的行为?
提前感谢。
此致
弗兰克
器件型号:LDC1000
您好!
当我们的磁性编码器环开始转动时、我们会看到以下效果。 您能解释一下这种行为吗?
我希望切换到后续芯片 LDC1001时也会发生相同的行为?
提前感谢。
此致
弗兰克