请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 主题中讨论的其他器件:IWR6843、
工具/软件:Code Composer Studio
您好!
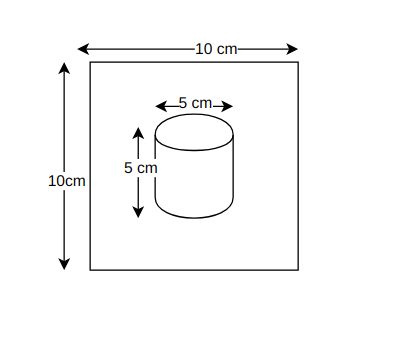
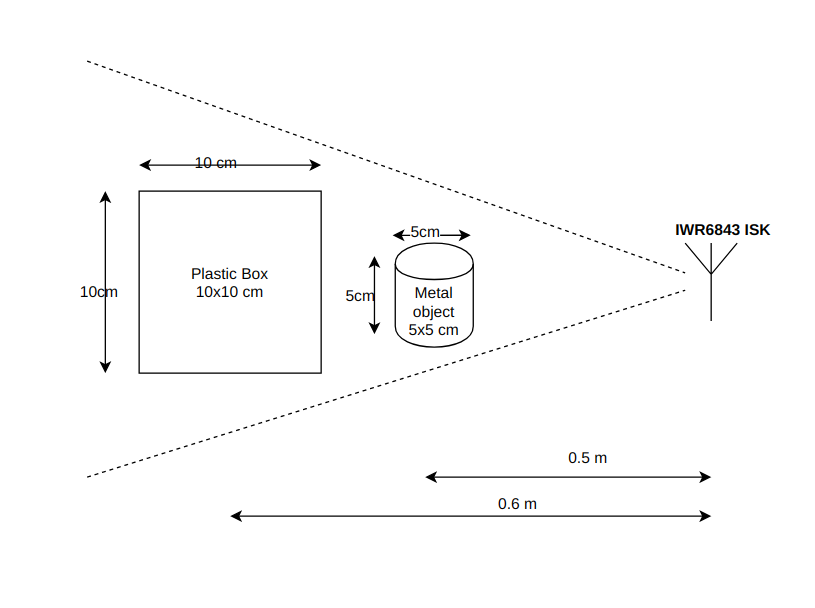
IWR6843 ISK 能否在 0.5 MTR 距离处检测彼此相邻的多个不同材料物体?
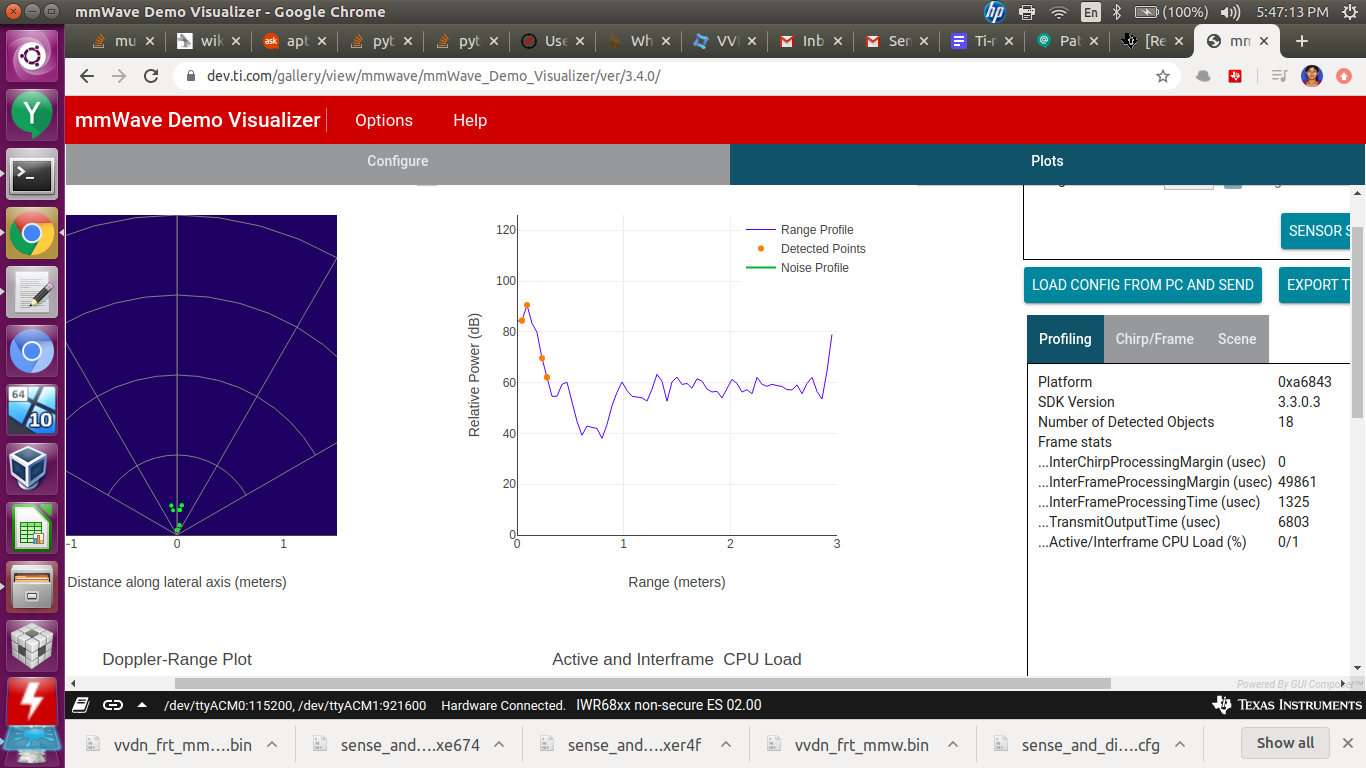
在 TI 提供的 python GUI 应用中是否可以进行此检测?
渴望了解您对此类应用的看法。
我想知道适合此应用的演示应用和线性调频脉冲配置。
工具/软件:Code Composer Studio
您好!
IWR6843 ISK 能否在 0.5 MTR 距离处检测彼此相邻的多个不同材料物体?
在 TI 提供的 python GUI 应用中是否可以进行此检测?
渴望了解您对此类应用的看法。
我想知道适合此应用的演示应用和线性调频脉冲配置。