主题中讨论的其他部件:TIDA-010022、 MMWAVEICBOOST、 CC3235S、 SysConfig、 AWR1843BOOST
我查看了 TI 的 TIDA-010022文档、但它没有源代码。 阅读后、我想问:
该文档中的 wifi 模块是 CC1352。 为了在 IWR6843和 CC1352之间通过 UART 进行通信、两个模块都必须修改某些器件。 如果我通过 UART 连接 IWR6843和 CC3235、是否需要进行修改? 如果是、我需要添加/删除哪个部分? 在该文档中、它提到 MMWAVEICBOOST 需要添加 R81、R122、但没有说明我需要使用哪个电阻器值。 如果使用 CC3235、请提供详细信息。
2.在 CC1352上、连接到 IWR6843之前必须先卸下 SMA 连接器。 CC3235呢?
在 CC1352上、它必须移除以下跳线:"5V"、"3V3"、"RXD"和"TXD"、并将 XDS110电源跳线切换至"Extern Power (示波器电源)"。 在 CC3235上、我看不到3V3跳线。 是 VBAT 还是 BRD 跳线? 是否必须同时移除 VBAT 和 BRD 跳线?
4.如何将 XDS110切换到 示灯电源?
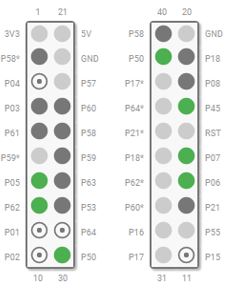
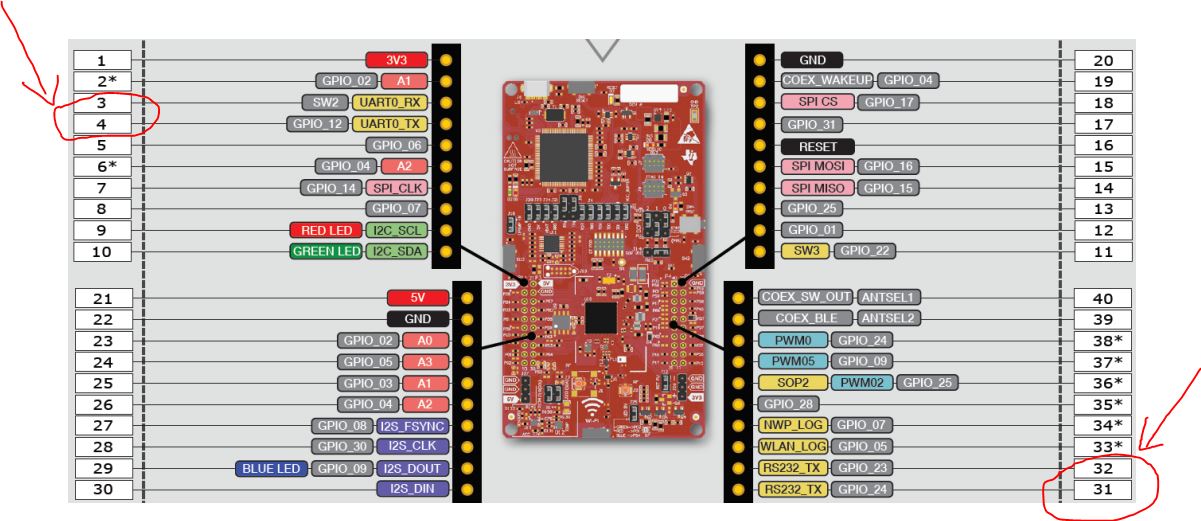
为了进行 UART 通信、我需要连接哪些引脚? 据我了解、将 CC3235上的 P1.3连接到 J5连接器的引脚5、并将 CC3235上的 P1.4连接到 MMWAVEICBOOST 上 J5连接器的引脚7、对吧?
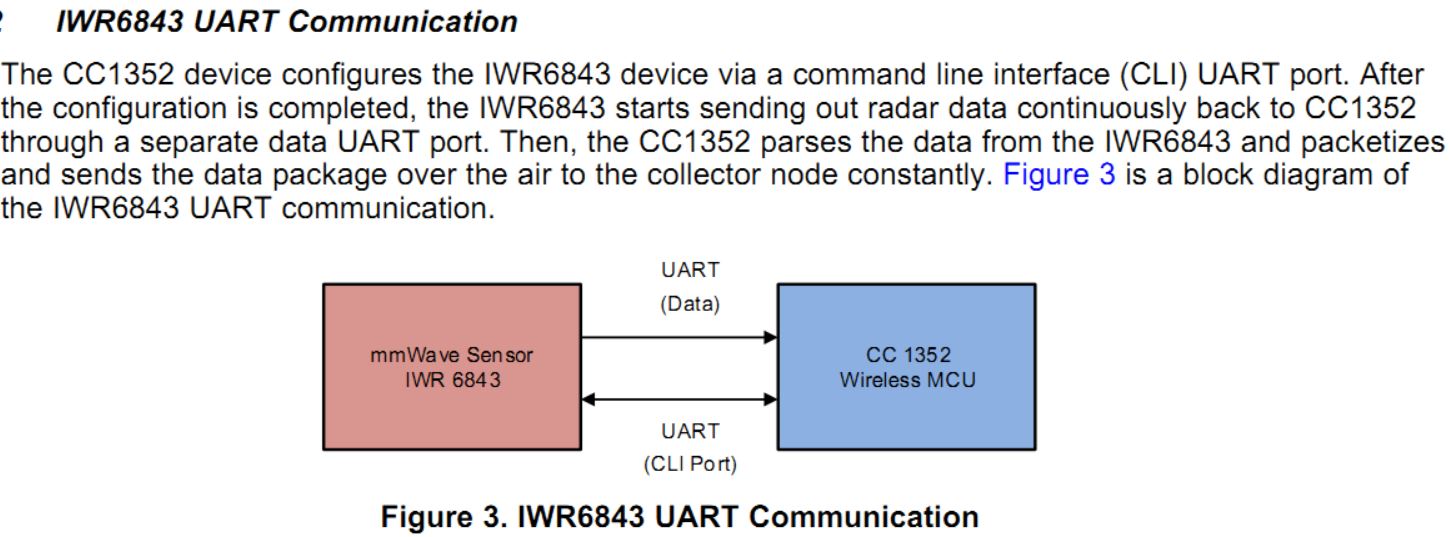
6.如下图所示,请说明 UART (数据端口 )与 UART (CLI 端口)之间的区别。 我知道、IWR6843 MMWAVEBOOST EVM 和 CC3235只有1个 USB 端口。 它们如何通过2个独立的 UART 端口进行通信?
简而言之、请为我提供说明、其中包含通过 UART 在 IWR6843和 CC3235之间进行布线的原理图、用于在2个模块上进行硬件修改的电阻器值等...