请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:PGA460 主题中讨论的其他器件:、 ENERGIA、 MSP430F5529
您好!
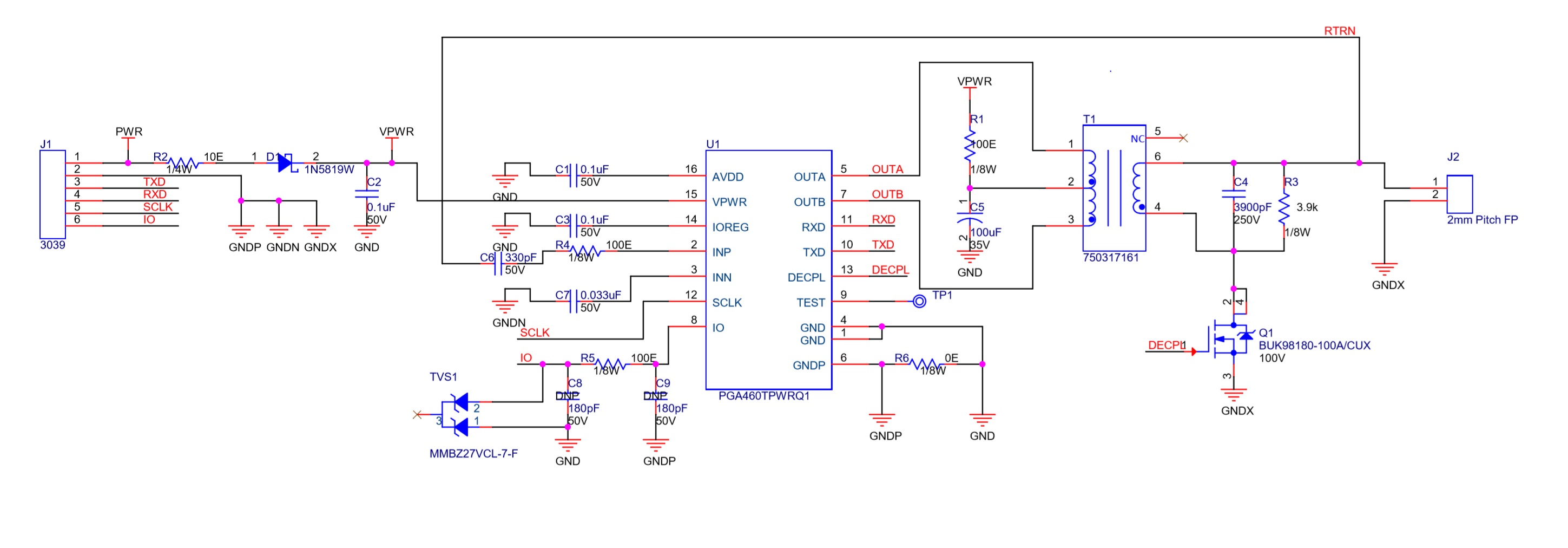
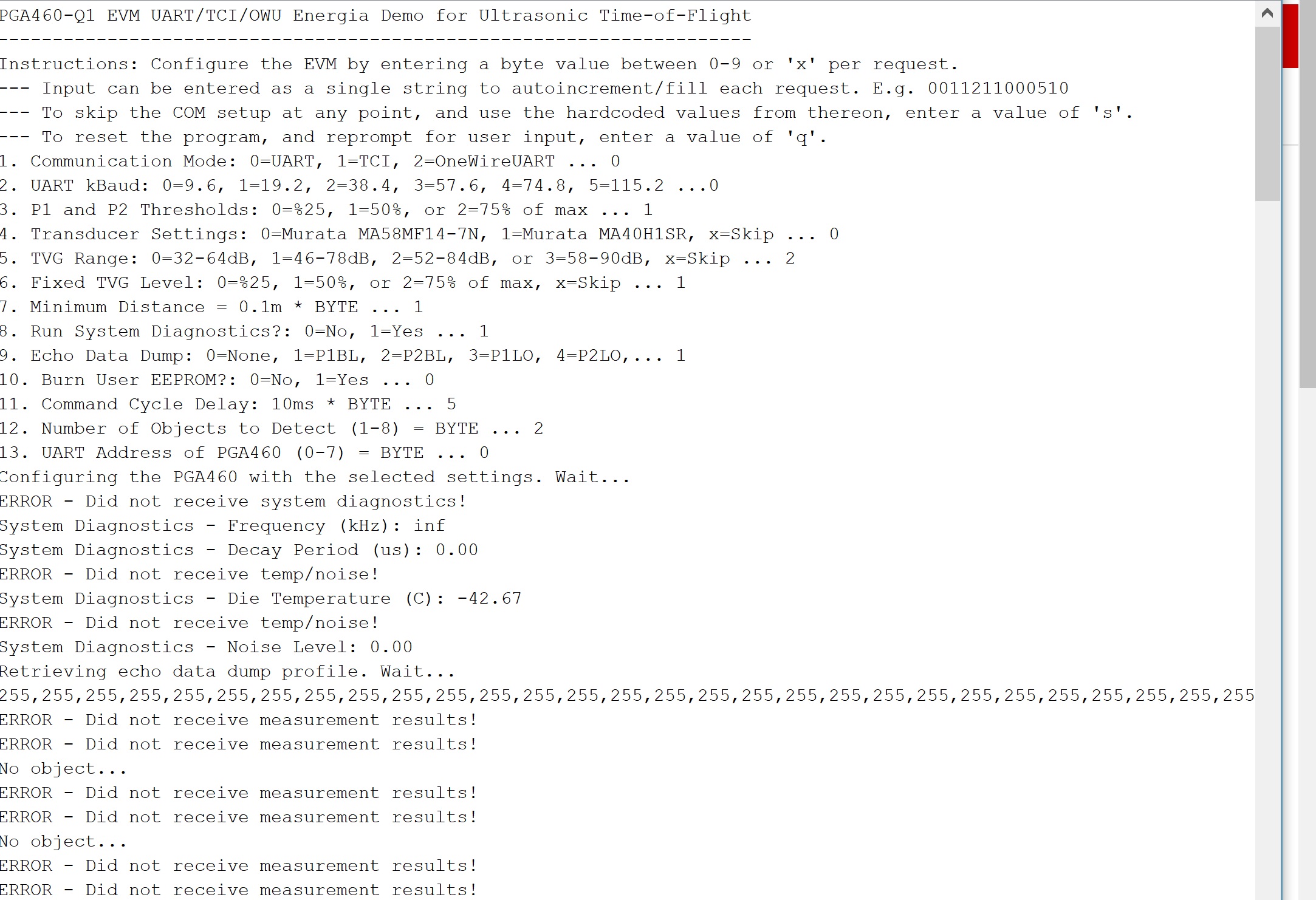
您能否与我分享用于连接 PGA460-Q1的 Arduino 源代码。我已经使用 PGA460-Q1驱动器 IC 和 Murata 传感器设计和开发了超声波传感器模块。我想将此传感器与 Arduino uno 集成以获取距离信息。请为此提供合适的源代码
谢谢、此致
Sreejith S V