请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1443BOOST 主题中讨论的其他器件:IWR1443、 IWR6843、 IWR1642
您好!
我想使用 IWR1443执行物体跟踪、因为它具有高度测量功能(而且 IWR6843暂时无法正常工作)。
这是我的第一个问题:
- 我在实验室中没有看到 IWR1443的跟踪完成了,这是可能的吗?
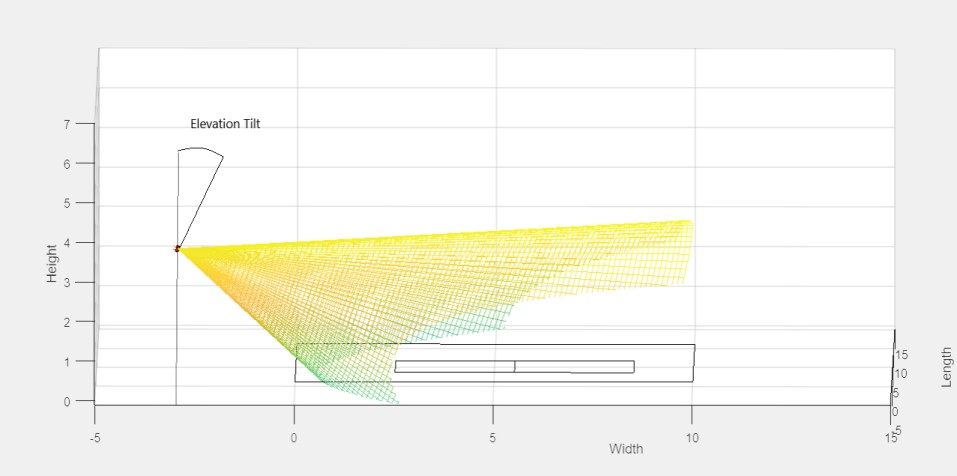
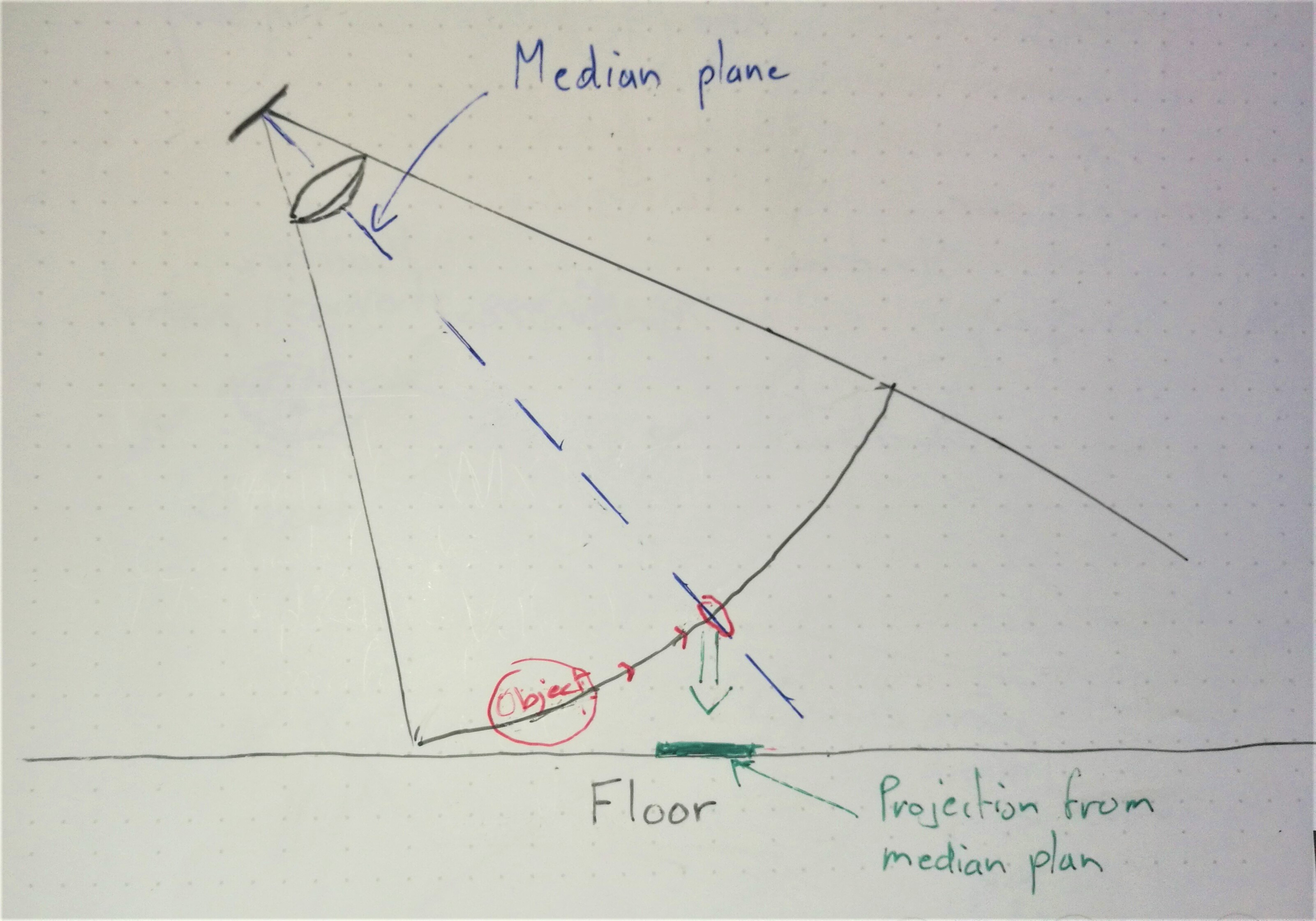
在我的用例中、毫米波传感器必须位于地板上方几米处、并跟踪地板上移动的物体。 如果我想"看到"这些物体、我必须放置仰角(约30°)。 但是、借助此倾斜、我将需要 Z 数据来计算我的目标在地面上的确切位置、具体取决于 E 倾斜度。 这是我的第二个问题(没有关于模型的问题):
- 跟踪是否可以通过3D 点云完成? 如果是,我必须创建 GUI 以可视化这些数据和跟踪?
最后一个问题、关于仰角倾斜:
- 如何告知传感器方位角和仰角? 在哪里(mmWaveDevice 或 GUI) 必须计算地面坐标?
很抱歉、如果我不清楚、我将添加 GUI 图片、以帮助您在需要时了解我的用例。
感谢您的帮助!
昆廷。