工具/软件:Code Composer Studio
您好,
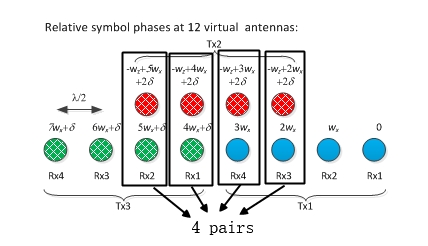
在 SDK3.2中、仰角的计算方法如下:
在源文件 aoaprocdsp.c 中、函数 AoAProcDSP_processMultipleVirtualTANAas 执行3D 仰角 DFFT 、如下所示:
if (DPParams->numVirtualAntElev >0)
{
/*将标高符号恢复为 FFT 输入缓冲器*/
memcpy(((void*)&res->angleFftIn[0],
(void*)提升符号[0]、
DPParams->numVirtualAntelse * sizeof (cmplx32Reim_t);
/*零填充*/
memset(((void *)&res->angleFftIn[DPParams->numVirtualAntelo],0,
(DPU_AOAPROCDSP_NUM_ANGER_Bins - DPParams->numVirtualAntel高度)* sizeof (cmplx32Reim_t));
/* 3D-FFT (高度 FFT)*/
dsp_fft32x32 ((int32_t *) res->angleTwidle32x32、
DPU_AAOAPROCDSP_NUM_ANGE_Bins、
(int32_t *) res->angleFftIn[0]、
(int32_t *) res->elevationFftOut[0]);
}
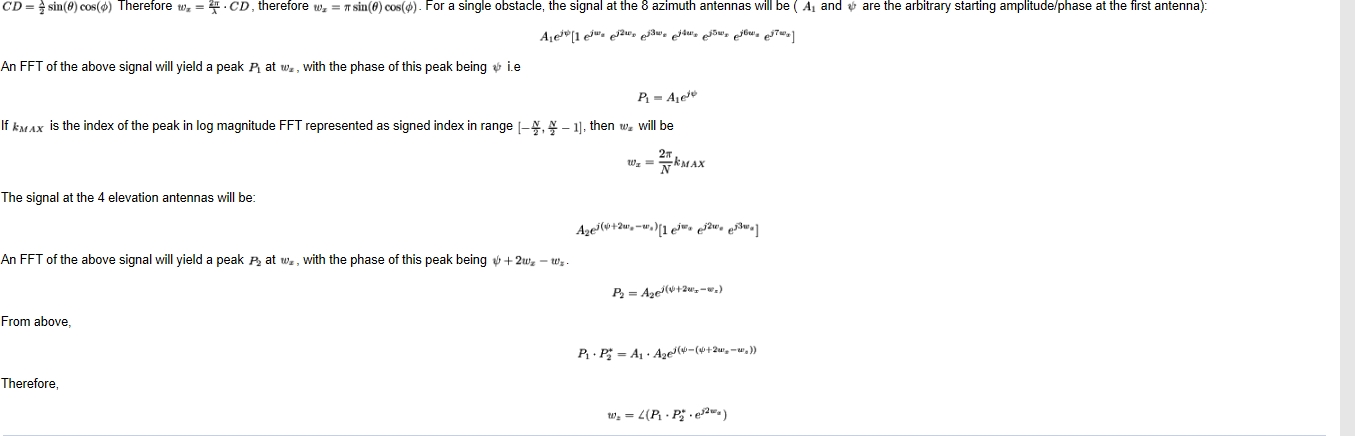
我有疑问,为什么不通过搜索 res->elationFftOut 中最大值的索引来计算仰角?
谢谢、
此致、
按比例