您好!
我使用 的是 MMWAVE_SDK_03_03_00_03和 MMWAVE_INDUSIAL_toolbox_4_0_0。
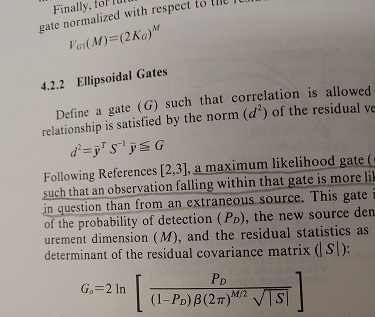
在"章节3.4.1中。 在路径 C:\ti\mmwave_sdk_03_00_03\packages/ti\algtrack\docs 下的"跟踪具有多个反射点的雷达目标.pdf"中、建议使用恒定体积(V)概念、而不是传统的恒定栅极(G)。 这对我来说是有道理的。 它还说、引用、"在给定恒定体积 V 的情况下、我们计算 G。"
和"章节4.3.2 "中的表5。 高级参数-门控参数"、我们将"门控函数参数"设置为:volume、DepthLimitit、WidthLimitit、HeightLimitit、VelocotyLimitit。
因此、我假设我们在配置文件中提供 V (特定于目标)、然后内部 GTrack 将计算 G
但是、当我跟踪 GTrack 的源代码时、我没有找到该计算(从 V 到 G)。
首先、在路径 C:\ti\mmwave_industrial_toolbox_4_0_0\labs\traffics_monitoring\18xx_68xx_traffics_monitoring 下的演示项目中、它会将配置文件中的'Volume'读取为'GAIN'、如\traffics_monitoring_18xx_MSS\tracker 实用程序.c 中的359行所示、
gMmwMssMCB.trackerCfg.trackerDpuCfg.staticCfg.gatingParams.gain =(float) atof (argv[1]);
在文件 C:\ti\mmwave_sdk_03_03_00_03\packages/ti\algtrack\src\gtrack_unit_start.c 中的第123行中、我们有
Inst->G = inst->gatingParams->Gain;
在文件 C:\ti\mmwave_sdk_03_00_03\packages/ti\algtrack\src\gtrack_unit_scal.c 中的第131行中、我们有
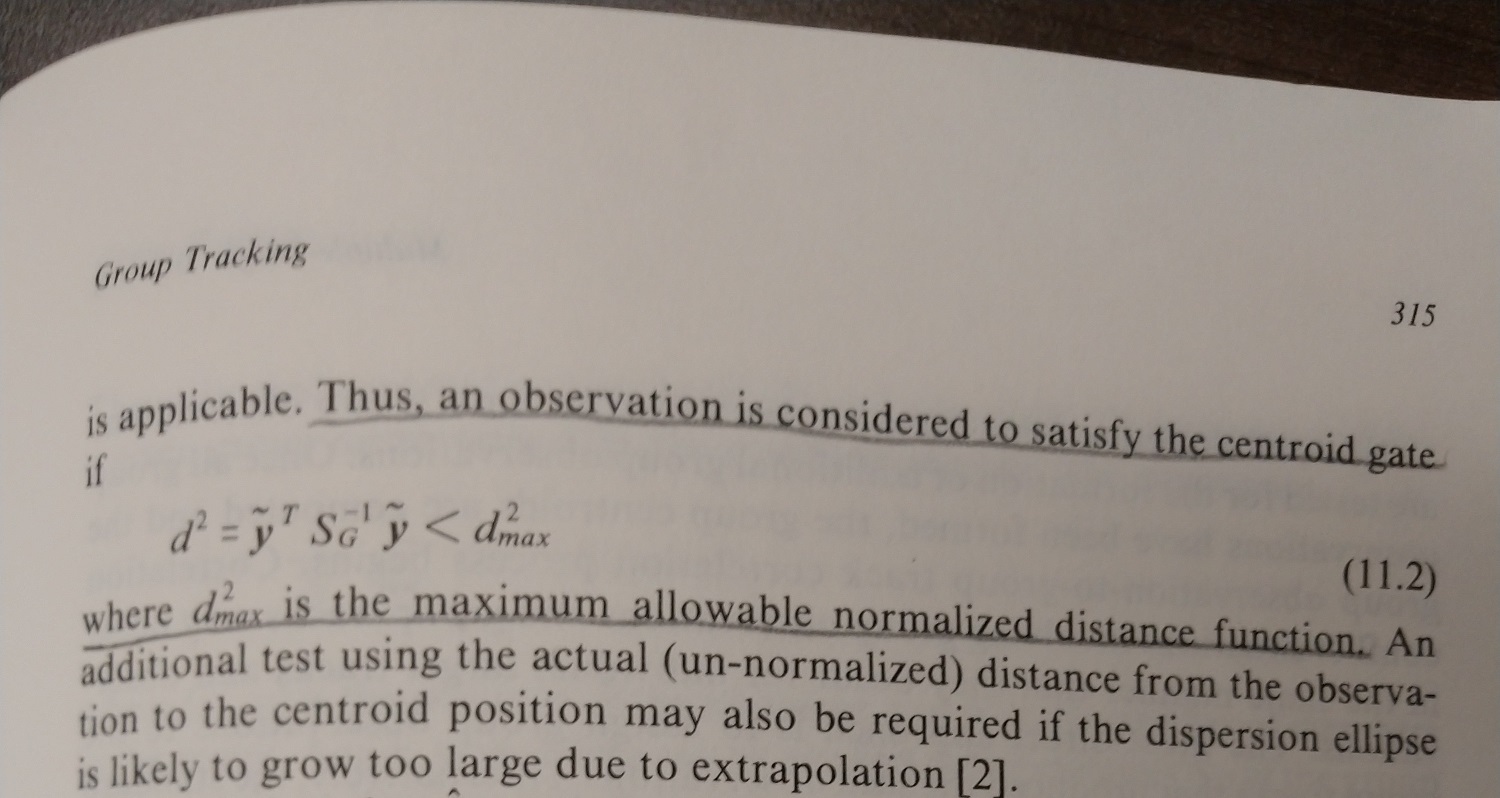
/*门控步骤*/ if (mDP < inst->G){
mDP 是 Mahalanobis 距离、没有速度维度。 因此、对于当前版本的 MMWAVE_SDK、Gtrack 仍然实现恒定"G"、如"使用雷达应用进行多目标跟踪"一书中所示。
同时、对于限制参数、即 DepthLimit、WidthLimit、HeightLimit 和 VelocotyLimit 、在'Gating Function Parameters'中、它们将更新为'H_limites.vector'、如下所示。

但 H_limits.vector 尚未在任何其他位置使用。 因此、限制参数似乎是"样例"。
简单地说、我想确认两点:
虽然在 Gtrack doc 中提出了常数"V"、但它仅在当前版本的 MMWAVE_SDK 中实现常数"G"(从03_03_00_03起)。 配置文件中'gatingParam'中的参数'Volume'的作用是'G'而不是'V'。
2. 其他参数,即配置文件中'gatingParam'中的 DepthLimit、WidthLimit、HeightLimit 和 VelocotyLimit,对选通结果不执行任何操作。
顺便说一下、门控函数中的参数"增益"会导致与卡尔曼"增益"的混淆。 可能"门"比参考手册中的更好。
谢谢、
Feng