This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/597434/awr1642-zooming-into-range-fft
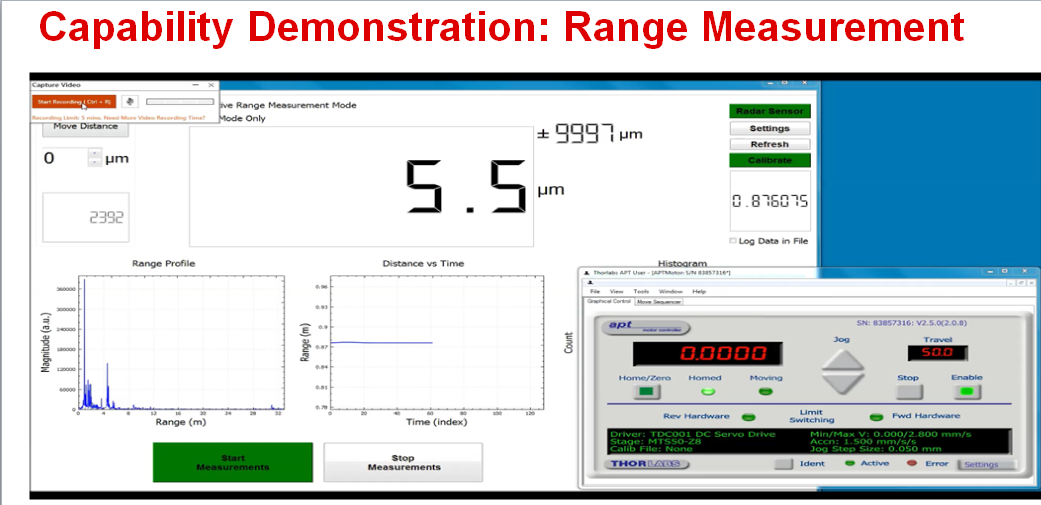
我们的应用需要高精度的单个物体的计算范围、与以下演示中所示的内容类似。
我们不需要如上所示的微米精度、但需要5mm 的精度。 这可以通过当前 SDK 进行演示吗? 如果是、应使用哪些参数?