

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:OPT8241-CDK-EVM
工具/软件:TI C/C++编译器
大家好、
我想通过在 VoxelViewer 中使用 OPT8241摄像头从物体获取更准确的深度信息。
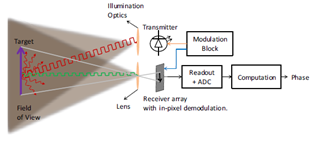
根据以下距离公式、我们需要校准和控制调制频率以获得正确的物体距离。
距离=PHASY*范围/(2*PI);
R (RANGE)=C/(2*GCD (F1、F2));
除了频率校准方法以提高物体距离的精确度外,我们是否可以通过体素 SDK 或固件修改以调制频率(F1,F2),从而获得更精确的物体距离?
下面是频率校准流程。
•频率校准
•需要进行频率校准以校正调制频率中的任何误差。 调制频率误差应达到恒定系数、可按如下方式轻松计算:
测量馈入照明源的信号的实际频率。 让它成为"FM"。
让预期频率为'fe'。
然后、校正因子= fm/fe。
•要在摄像机配置文件中设置频率校准、请在其"calib"部分中设置以下内容:
•FREQ_COR= FM/Fe FREQ_COR_AT = Fe
此致、
盛华
