请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1642 工具/软件:Linux
您好!
我正在尝试 按照 TI 毫米波 ROS 驱动程序设置指南中的说明设置 ROS 环境。 Ubuntu 16.04虚拟机安装在 Windows 上、我安装的软件版本为:
ubuntu-16.04.3-desktop-amd64.iso
VMware-player-14.1.1-7528167.exe
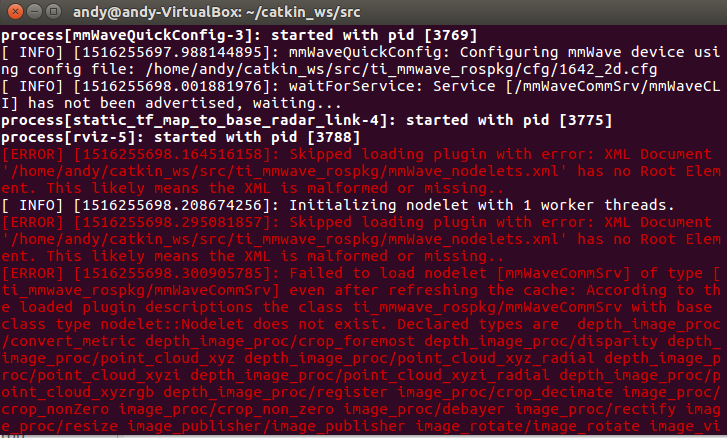
在安装 ROS 之前,我检查了虚拟机网络和共享文件夹是否可以正常工作,关闭虚拟机,然后可以正常启动。 但是,在执行以下链接中的指令以安装动能 ROS 后,关闭虚拟机,它不能再次重新启动,它会提醒如下图所示的信息。
http://wiki.ros.org/kinetic/Installation/Ubuntu
然后单击[确定]以选择[尝试使用默认图形模式运行],虚拟机屏幕将显示为黑色,无法进入登录界面。 我已卸下计算机并重试、但问题相同。 您是否会帮助指导我如何解决问题并让我继续? 期待您的评论、非常感谢。

BR、
Andy