请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1642BOOST 您好!
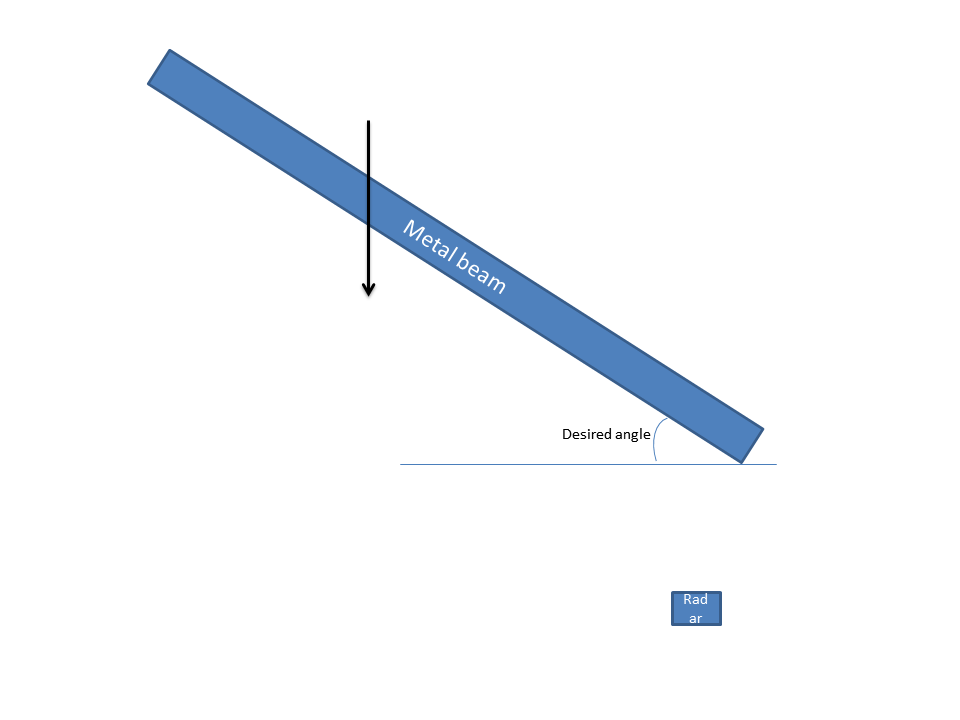
我正在研究 AWR 系列是否可用于查找朝向雷达移动的金属光束的角度(图片中添加了更多说明)。 光束到达雷达的最近点为15-20厘米。 这是否可以通过 AWR 系列来实现、并优先选择哪一个? 是否可以说角度在最接近点的精度有多高?
到目前为止、我们已经测试了 AWR1642BOOST、但仅使用演示可视化工具、在某些点上很难找到波束、而且在这些时间、GUI 中仅显示1点。
未找到演示可视化工具和 DSP 对数据的确切作用、因此我想知道通过使用原始 ADC 数据或通过 UART 发送的数据、是否可以查看射束区域或使用多个点而不是多个点 只需1即可找到它的角度?