请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1443BOOST 您好!
在我使用演示可视化工具进行的实验中、2 TX 天线 cfg 文件检测到的对象比3 TX 天线 cfg 文件多2倍、具有相同的 profilecfg 和 framecfg 设置、即2TX 和3tx 配置文件、 我更改了 profilecfg 行和 framecfg 行、以便它们都配置如下:
ProfileCfg 0 77 7 6 57 0 70 1 100 2000 0 30
帧配置0 1 20 0 50 1 0
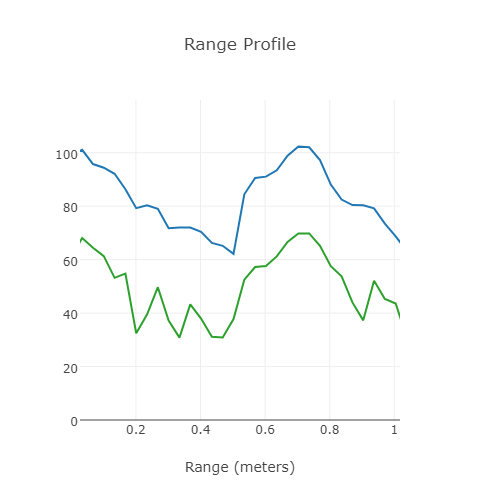
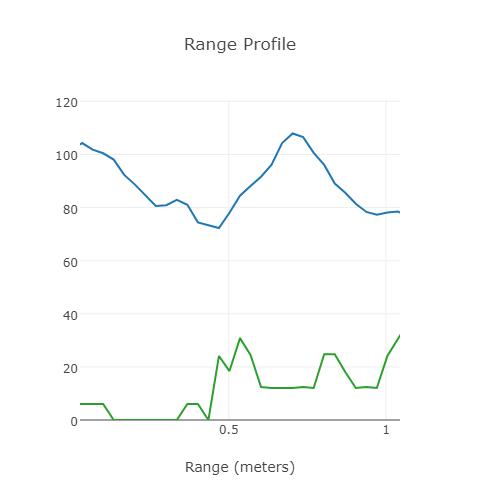
结果是使用2个 TX 天线时、检测到的物体的数量约为100、而3个 TX 天线的结果为51。 这让我有点困惑、难道不应该是另一种方法吗?
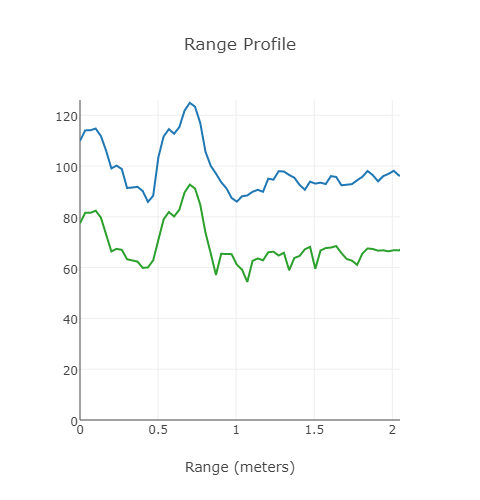
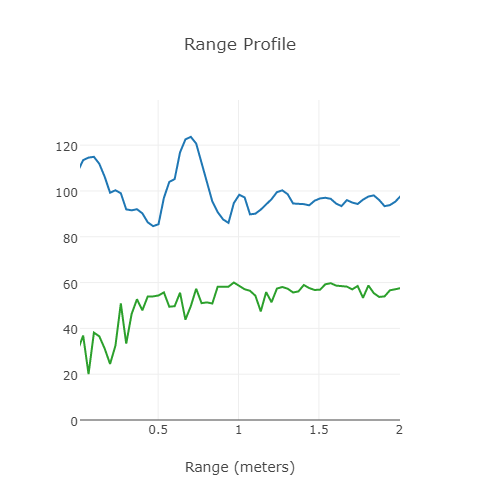
此外、检测到的物体数量随每帧的环路或线性调频脉冲数量(即帧配置行中的第3个数字)的增加而增加。 是否有人可以向我解释这种关系的原因、以及每帧检测到更多物体是否更好? 这是否意味着更好的距离分辨率? 但是 、在我使用演示可视化工具进行的实验中、距离分辨率数字的结果完全没有变化。
非常感谢。
郭正 孙