请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
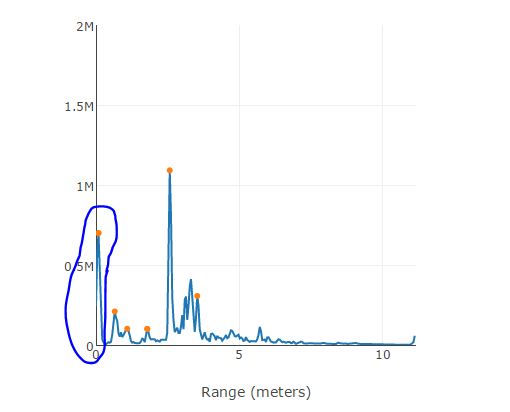
器件型号:AWR1443BOOST 我将 AWR1443BOOST 与毫米波演示可视化工具 GUI 配合使用。 在使用"最佳距离分辨率"的默认配置时、我注意到距离系统配置图的0米位置始终存在非零读数。 请参阅随附的屏幕截图中的突出显示区域。 我已尝试将所有物体移离 AWR1443BOOST 板的正面、但无法导致距离剖面图的0米读数降低。 我的问题是什么导致了0米处的读数? 这是由连接到电路板的金属支脚引起的吗?
-Ruben