请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1443BOOST 主题中讨论的其他器件: IWR1642BOOST、 IWR1443、 IWR1642
大家好、
客户对 IWR1443BOOST 和 IWR1642BOOST 有一些问题。
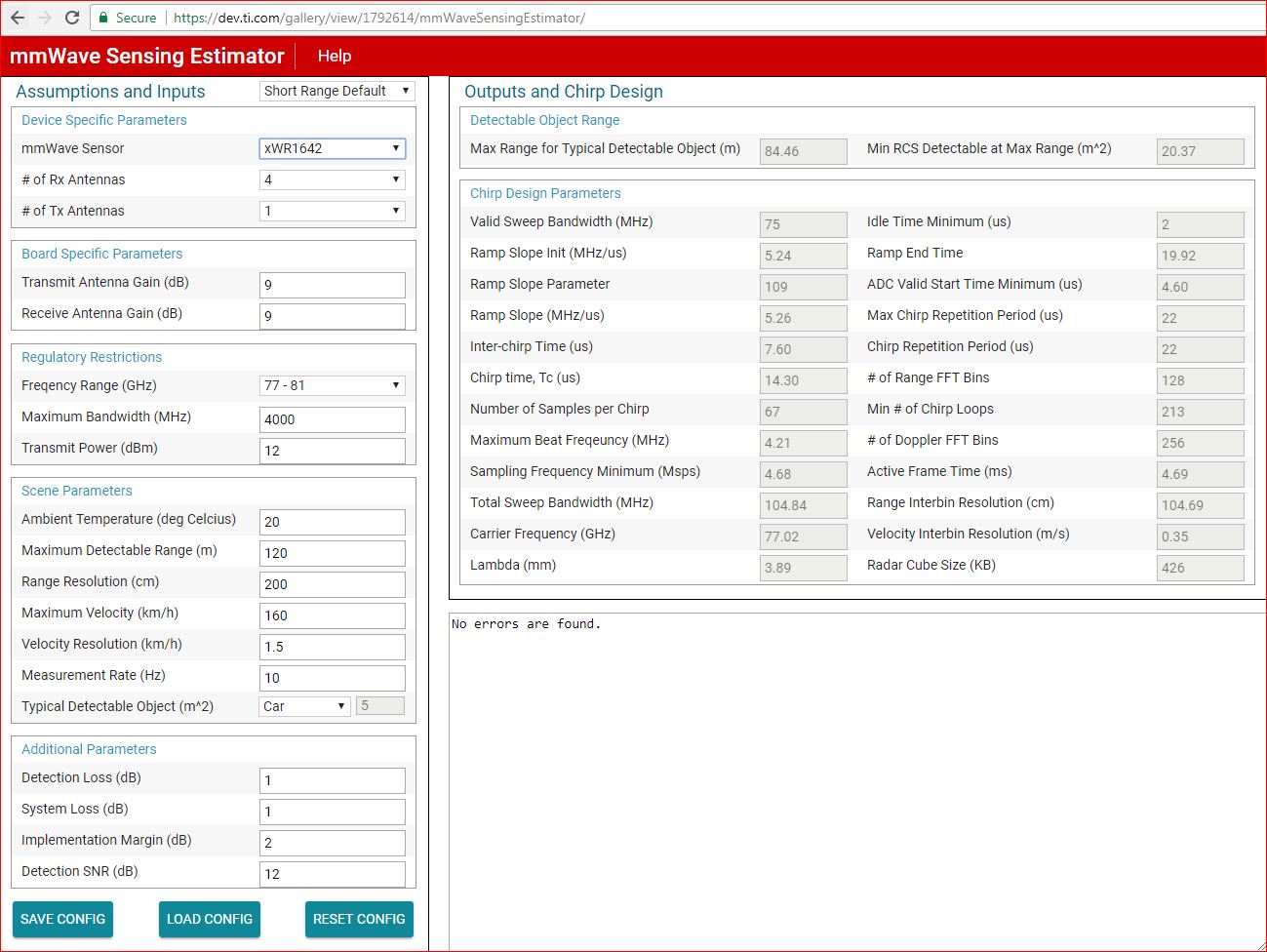
问题1:移动支持有何差异? 客户将测试高达160公里/小时的移动物体。哪种设备可满足其要求?
Q2: IWR1443BOOST 和 IWR1642BOOST 是否 推荐使用集线高功率室外单天线?
问题3:客户希望进行二次开发。 这两个升压器可以在多大程度上进行开发?
祝你一切顺利、
张美键
亚洲客户支持中心
应用工程师