请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1443BOOST 主题中讨论的其他器件:IWR1443、 TIDEP-0091
尊敬的所有人:
我有 IWR1443 EVM 和 DevPack EVM。
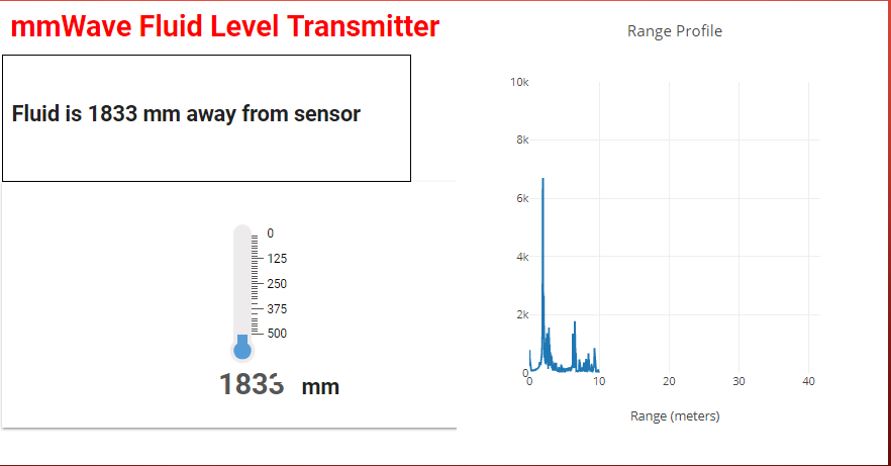
我对雷达的液位应用非常感兴趣、似乎效果很好。
但是、当前有关该级别的信息仅通过使用网页 https://dev.ti.com/gallery/view/4768107/mmWave_Fluid_Level_Transmitter_1_0_0/显示
我的问题是:
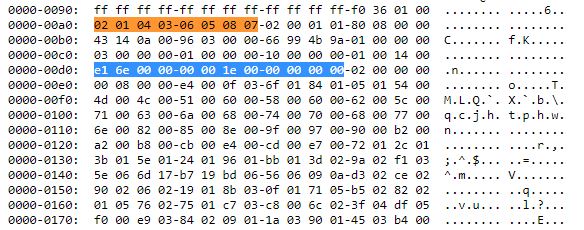
1) 1)我能否在标准协议中的某个位置获得有关电路板外可用的毫米级别的信息?
2)(此问题有点困惑、因为我不是 TI 器件专家)
我能否使用一些工具(我认为 Radar Studio 更合适)来配置天线、传输信号、接收信号等?
3) 3)该器件应在低功耗应用中工作。 如何打开/关闭或处于睡眠模式、并在中断时立即发送电平?
再次抱歉、我更熟悉微控制器、它的一切都很简单、即时。 在这里、我发现了一些困难。
非常感谢、
Davide