Thread 中讨论的其他器件: AWR1642、 MMWAVE-SDK、 AWR1443
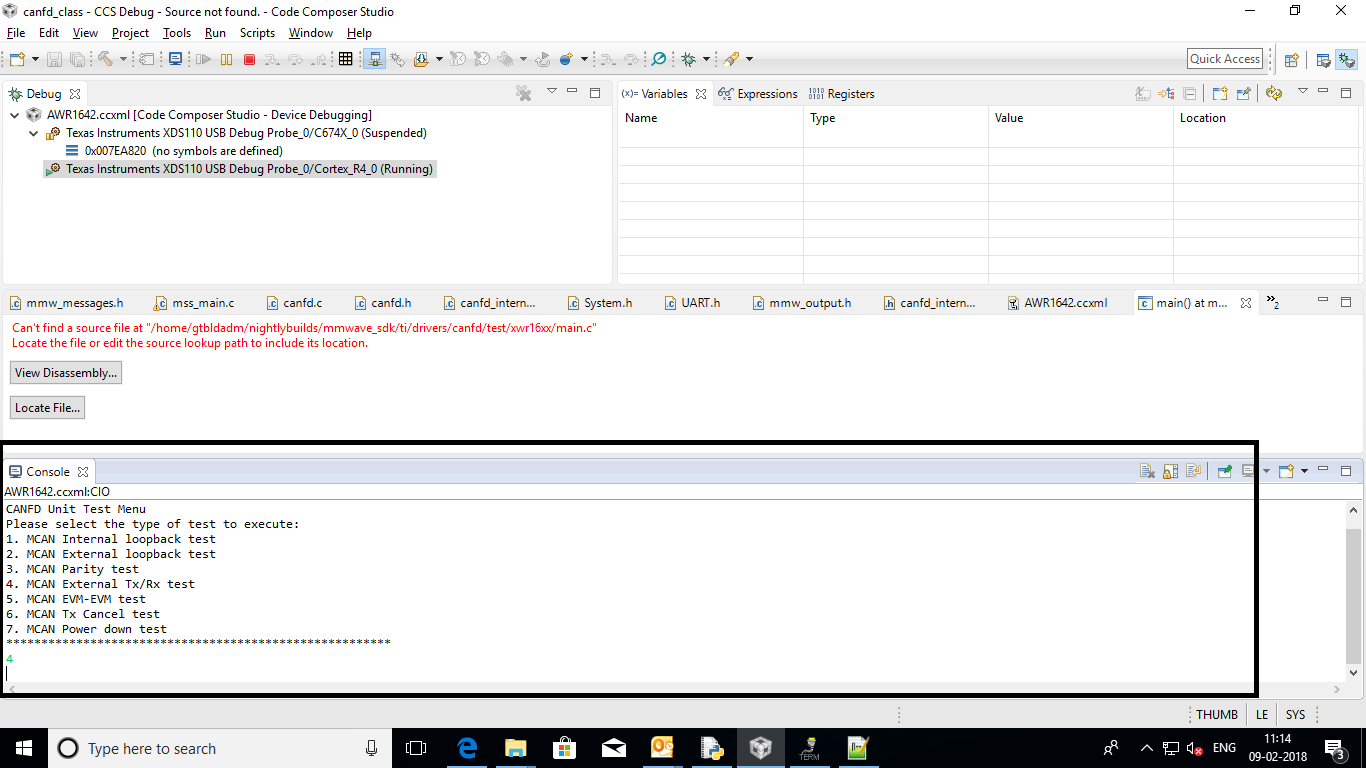
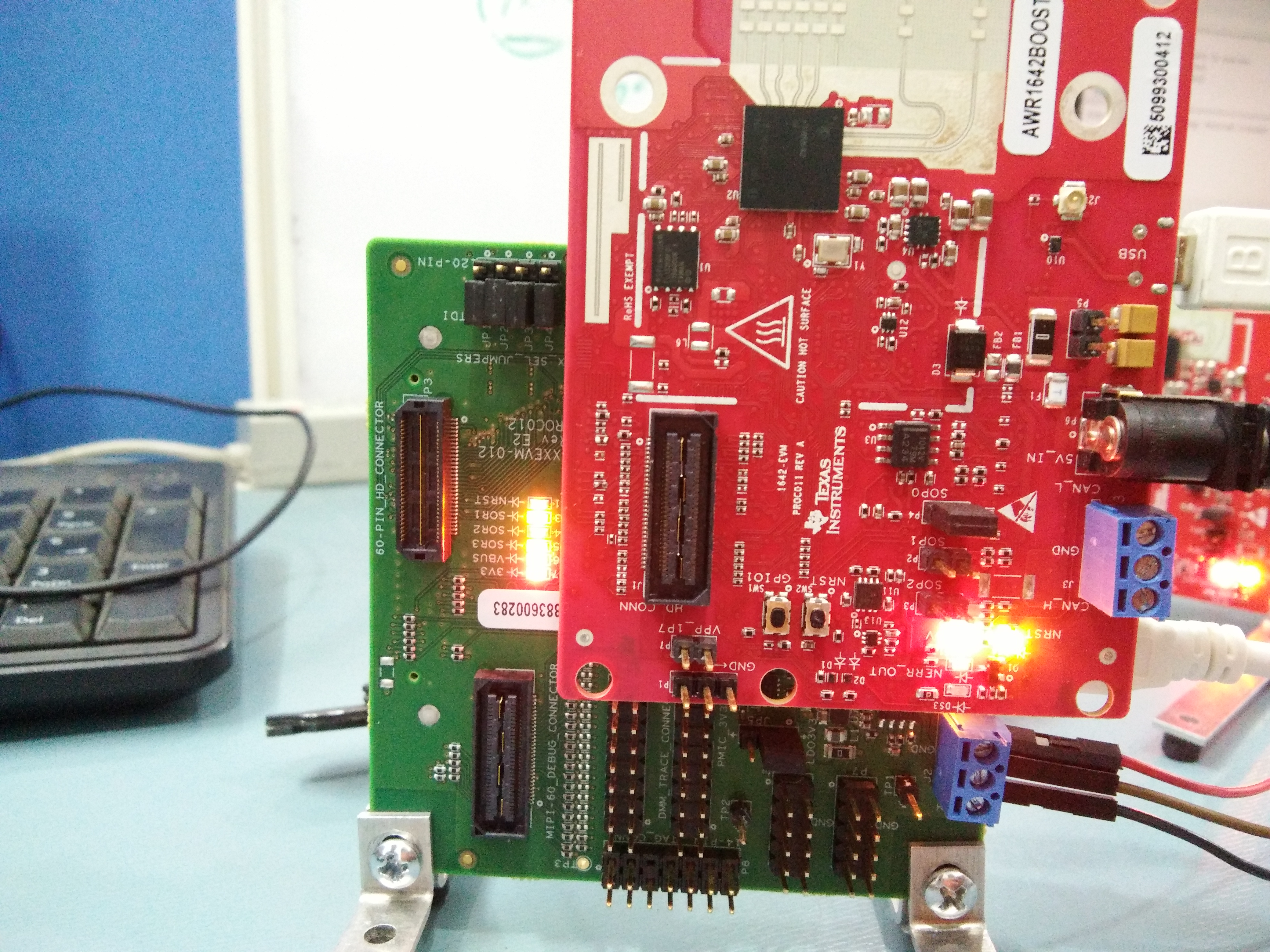
->我正在使用 AWR1642BOOST CANFD 来传输经典帧。我已进行了其他论坛中提到的必要 ECO 更改(移除 R6和 R4、在 R11和 R12中保持0欧姆、并将框架类型更改为经典。我已将 CANFD 代码从"C:\ti\mmwave_sdk_01_00_02\packages/ti\mw 从演示代码中删除并将其从内部代码\mw 转至演示代码 由于我的目的是检查与演示代码的 CAN 通信。我已确保 在这个集成代码中调用 mcanTransmitTest()(通过在 mcanTransmitTest()调用之前向 UART 写入测试字节来验证)。
->在接收器端,我们从 Keil 连接了 MCB2300板(因为目前我们没有矢量独木舟或其他工具)。我们有以下 CAN 模块设置
#define PCLK 24000000 //外设时钟,取决于 VPBDIV */
针对不同波特率的位时间寄存器的值
NT =标称位时间= TSEG1 + TSEG2 + 3
SP =采样点 =((1+TSEG1+1)/(1+TSEG1+1+TSEG2+1))* 100%
Sam、 SJW、TSEG1、TSEG2、NT、 SP */
const uint32_t CAN_bit_time[]={ 0x0001C000、/* 0+1、 3+1、 1+1、 0+1、 4、 75%*/
0x0012C000、/* 0+1、 3+1、 2+1、 1+1、 6、 67%*/
0x0023C000、/* 0+1、 3+1、 3+1、 2+1、 8、 63%*/
0x0025C000、/* 0+1、 3+1、 5+1、 2+1、 10、 70%*/
0x0036C000、/* 0+1、 3+1、 6+1、 3+1、 12、 67%*/
0x0048C000、/* 0+1、 3+1、 8+1、 4+1、 15、 67%*/
0x0049C000、/* 0+1、 3+1、 9+1、 4+1、 16、 69%*/
};
我可以选择上述任何一种配置、而且我也看不到两个不同的配置参数、例如接收器侧板中的标称段和 DataTime 段
配置。
A)所以 必须是接收器侧的 MCAN 支持板(我不知道 MCB2300板是哪种类型的 CAN)。
B)如果不是、接收器侧的所有 CAN 配置都必须与发送器侧(AWR1642升压- CANFD 经典帧)完全匹配?
示例:外设时钟、波特率等
c)我通过将 CANH、CANL、GND 连接到 MCB2300板 CANH、CANL、GND 引脚进行了测试、并尝试了
0x0025C000、/* 0+1、 3+1、 5+1 (标称 altseg1=5)、 2+1 (标称 altseg2=2)、 10 (NetworkTime)、 70%(采样点)*/
但我没有在接收器侧接收到任何 CANRX 中断。
谢谢、
PTKRISHNA。