

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1642BOOST 客户能够确认单个目标检测效果非常好。 在视野中、除了消声泡沫外、它还为人类带来了相当大的长距离增益。
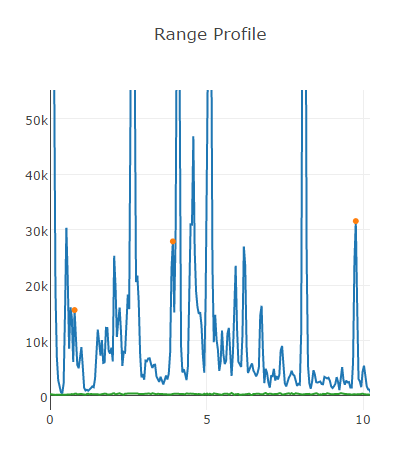
但是、其他目标产生的噪声会成为一个问题。 在下图中、左侧的目标为3m、前方的目标为4m、右侧的目标为5m。 8m 目标是4m 目标的一次谐波。
目标在两个方向(角度和距离维度)产生大量噪声。 这会提高目标周围的本底噪声。 因此、一旦您在视场中有一个强目标、现在为了在某个位置检测弱目标(人)、它必须具有大于40k 的振幅计数、而不是在视场中没有其他目标时所需的4K 振幅计数。
看来、有效处理多个目标的唯一方法是使用速度信息并对其进行跟踪。 但是,如果多个目标不移动,则不起作用。
我们如何解释这种行为?
此致、
标记
