请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1642BOOST 客户已对 AWR1642EVM 进行了相当多的测试、并注意到除非雷达以较大角度(水平以上或以下~15-25度)上下对准、否则检测范围不是很好。 但是、根据 EVM 数据表天线模式、我们期望最佳性能是雷达天线直接指向物体。
雷达与手推车上的平移倾斜装置一起使用、以生成数据。
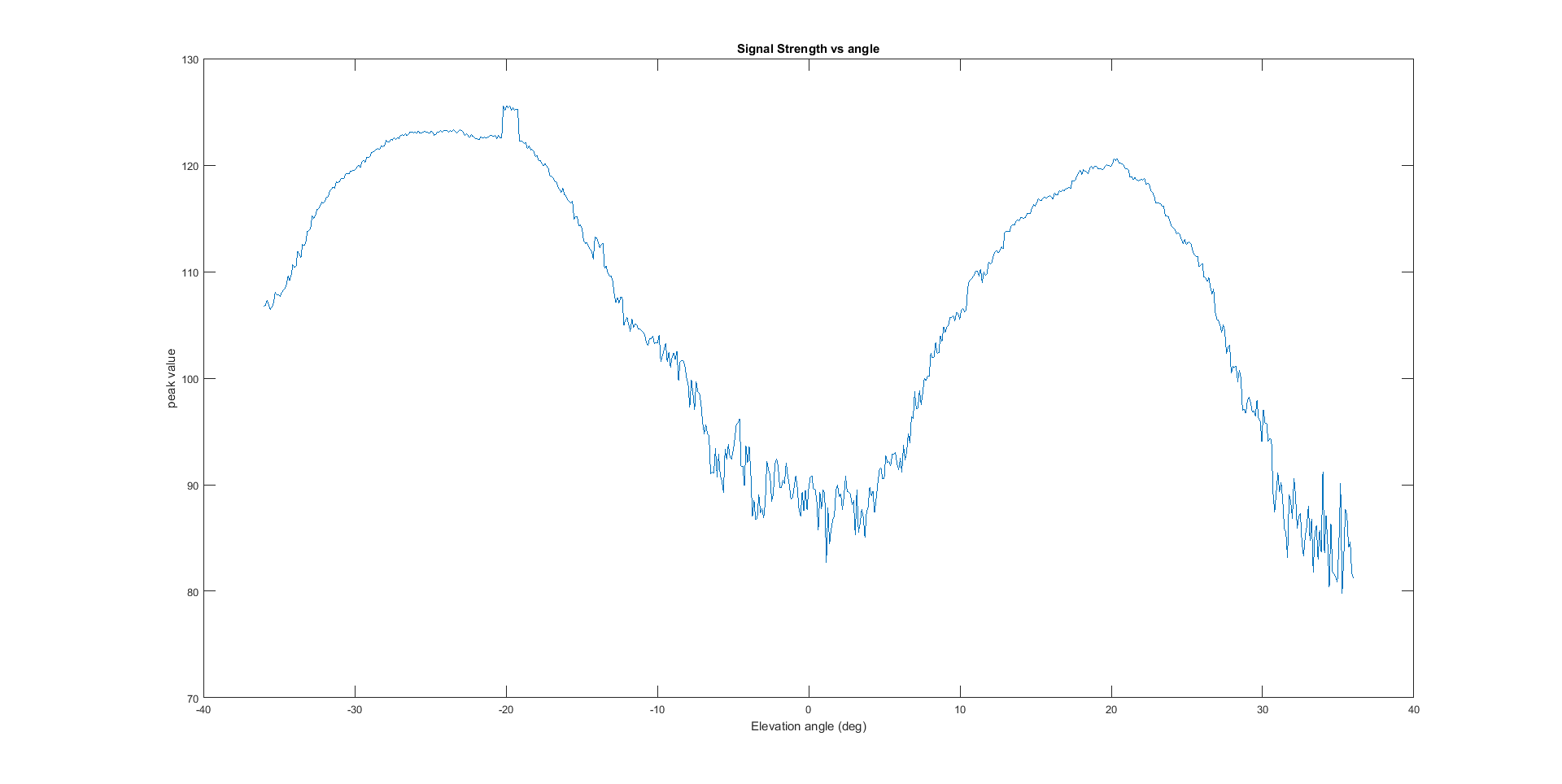
我附加了一个与我们在-36至36度范围内对雷达执行的仰角扫描相对应的图像,其中一辆静止的汽车垂直于雷达,距离为40米。 该图是从对应于车辆位置与时间之间关系的距离 FFT 库生成的。 使用平移倾斜装置手动扫描雷达、因此角度变化是合理的恒定变化、但不完全一致。
我们还发现了一篇 E2E 论坛文章,其中显示了与我们在蓝色曲线(Rev A 板,我们拥有)上观察到的结果与我们在红色曲线(Rev E1板)上预期看到的结果相似的结果。 https://e2e.ti.com/support/sensor/mmwave_sensors/f/1023/p/606010/2231194
您是否能了解到为什么汽车会显示为两个峰值而不是一个峰值?
TI 能否确认这是 AWR1642BOOST 版本 A EVM 板/天线配置的预期行为?
如果是、您是否能够针对给定角度提供更精确的 TX 增益值(输出功率+天线增益)?
请提供建议。
谢谢、
标记